Unmanned Aerial Vehicles
UAVs
At Data61 our research largely focuses on adding on-board sensing to allow UAVs to sense their surroundings and react accordingly, harnessing data in real time to make informed, intelligent decisions. We are developing aircraft systems for the dependable automation of larger unmanned aircraft flying in common airspace and UAV’s for Robotic Process Automation.
Unmanned Aircraft
Data61 we are developing dependable, autonomous UAV systems suitable for real-world tasks. We are developing technologies that will allow the safe, reliable, and cost-effective operation of unmanned aircraft for scientific and civilian applications. Unmanned aircraft (UAV, UAS, RPA, drone) are a rapidly growing sector of the aerospace industry.
We maintain a strong focus on the dependability of unmanned aircraft as we address the challenges of pilot-less helicopter operations in unmapped environments, mountainous terrain and turbulent conditions. Operations under such conditions require dependable hardware and software, precise flight control, robust state estimation, obstacle avoidance, autonomous planning, health monitoring, reasoning and decision making, and a high-level interface to allow the mission to be specified by a non-expert operator.
Robotic Process Automation.
We have also developed the Hovermap, a fully integrated aerial 3D mapping solution. The lidar data is logged on board to removable storage media during a mapping flight and then uploaded to a server for processing.
Our focus on user interfaces to tame the operation of complex autonomous flying systems is also unique to our Robotics group. We are the only research group that is in position to generate specialised control solutions automatically for our 4- and 6-rotor fleet, based on payload and mission constraints. Data61’s technology enables applications that are not possible with COTS UAV solutions.
Examples of the impact of our research:
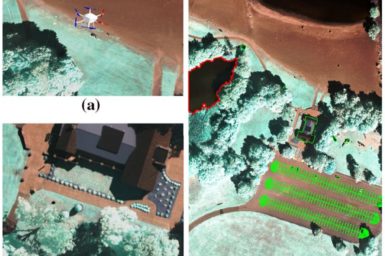
- Developed and deployed the world’s first UAV capabile of autonomous mission execution of low altitude, beyond line-of-site weed surveys over mountainous terrain in Project ResQu
- Demonstrated world first autonomous beyond line-of-sight infrastructure inspection mission in Project SmartSkies
- Demonstrated world first combined stereo + lidar collision avoidance for rotorcraft UAVs
- Demonstrated the first evolutionary system that automatically tunes UAV controllers in hardware. Controllers adapt to specific aircraft, payloads, environments, and missions.
- Presently being deployed in select projects that use Autonomous System’s UAV fleet.
- Evolved the first spiking neural networks for highly nonlinear, unconventional quadrotor control.