Weaver: Hexapod robot with 5DoF limbs for navigating on unstructured terrain
Proprioceptive control of an over-actuated hexapod robot
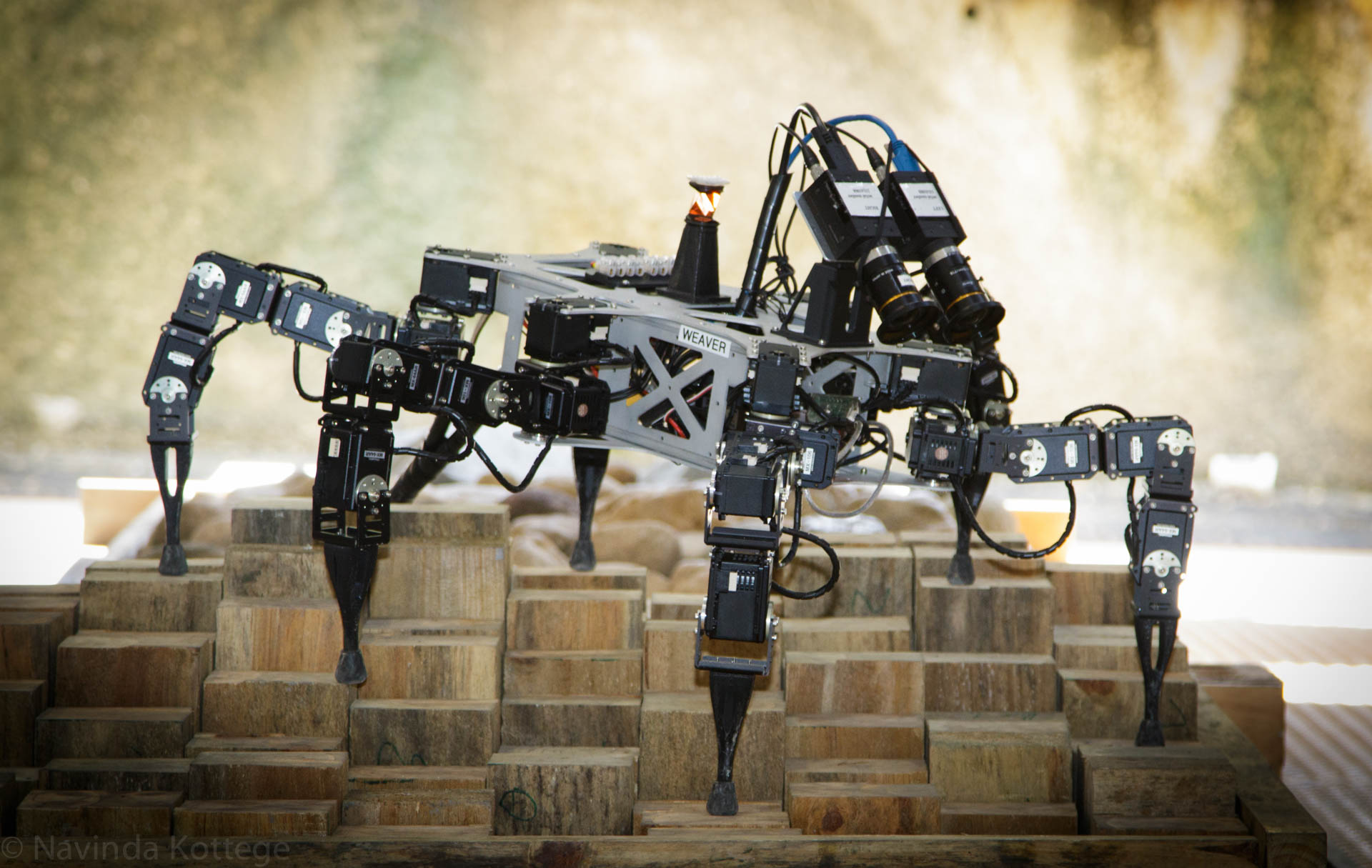
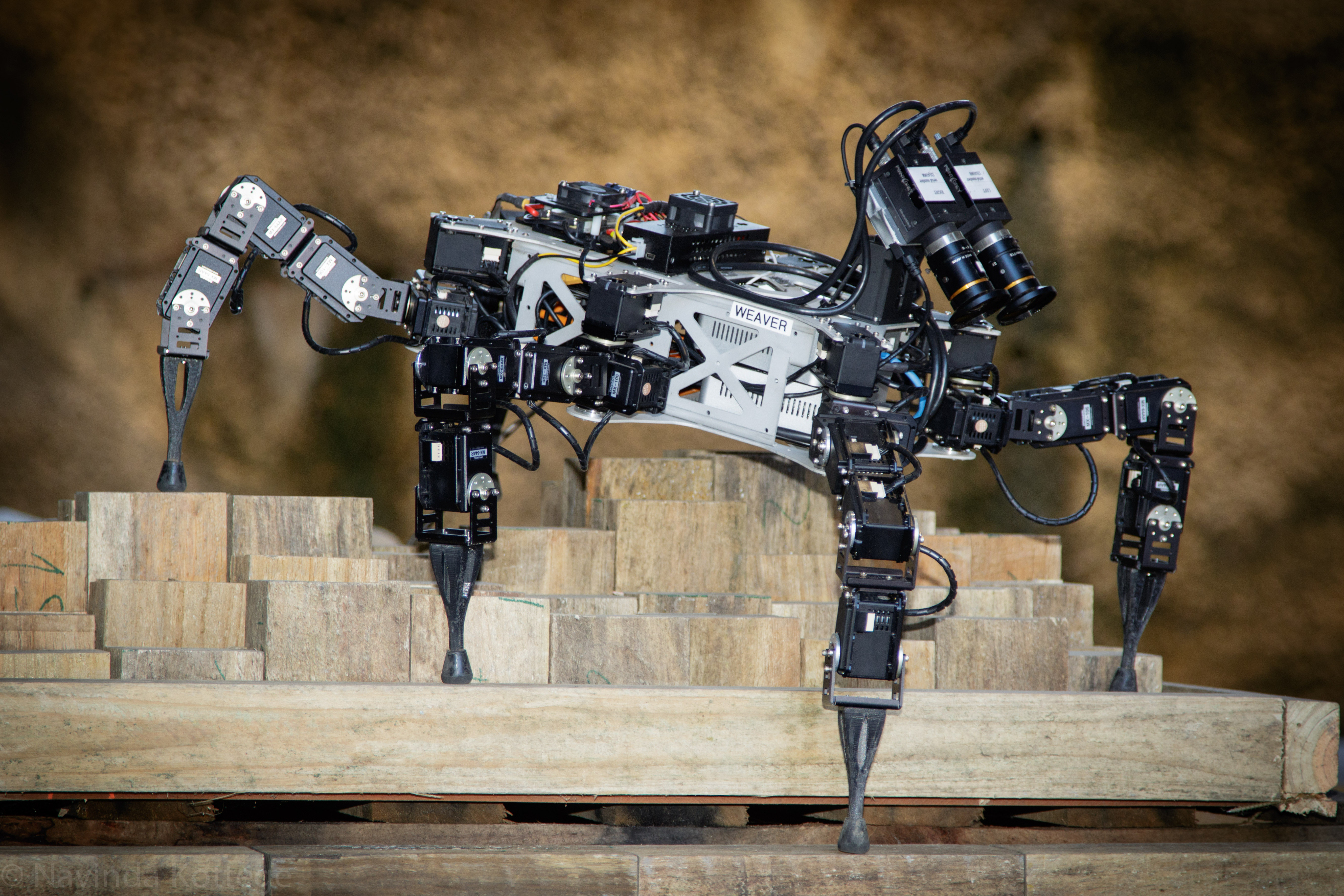
We introduce a novel hexapod robot, Weaver, which has five joints per leg and 30 degrees of freedom overall. The two redundant joints improve the locomotion of the robot by controlling the body pose and the leg orientation with respect to the ground.
The indirect force controller reacts to unstructured terrain and achieves self-stabilizing behavior without prior profiling of the terrain through exterioceptive sensing.
Instead of adding force sensors, the force is calculated by processing the torque output of the actuators. We experimentally evaluate Weaver with the proposed controller and demonstrate that it can effectively traverse challenging terrains and high gradient slopes, reduce angular movements of the body by more than 55% and reduce the cost of transport (up to 50% on uneven terrain and by 85% on a slope with 20°).
The controller also enables Weaver to walk up inclines of up to 30°, and remain statically stable on inclines up to 50°.
Terrain-dependent motion adaptation for hexapod robots
The ability to traverse uneven terrain is one of the key advantages of legged robots. However, their effectiveness relies on selecting appropriate gait parameters such as duty factor, stride height and joint stiffness. We present a novel terrain sensing method using stereo vision that can inform gait parameter selection for a legged robot. This method is evaluated using Weaver, a hexapod robot with 30 degrees of freedom, introduced in our previous work. The stride height and joint stiffness are adapted based on inputs from the vision system allowing the robot to effectively traverse variable rough terrain. Experiments show, that adaptive motion parameters lead to efficient locomotion both in terms of energy consumption and mission success.
Further extensions of this work introduced stride frequency adaptation as well as fully autonomous un-tethered operation. This includes visual-inertial odometry based navigation on 3D terrain.
In the news
Weaver was featured in the news coverage of the Queensland Combined Emergency Services Academy (QCESA) Emergency Services Expo in Brisbane on 10 august 2017.
Related papers
- Marko Bjelonic, Timon Homberger, Navinda Kottege, Paulo Borges, Margarita Chli, Philipp Beckerle, (2017), Autonomous Navigation of Hexapod Robots With Vision-based Controller Adaptation, In proceedings of the IEEE International Conference on Robots and Automation (ICRA 2017), Singapore, May 2017.
[Abstract][Paper] Download citation [BibTex] - Marko Bjelonic, Navinda Kottege, & Philipp Beckerle, (2016), Proprioceptive Control of an Over-Actuated Hexapod Robot in Unstructured Terrain, In proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2016), Daejeon, Korea, October, 2016.
[Abstract][Paper] Download citation [BibTex] - Timon Homberger, Marko Bjelonic, Navinda Kottege, & Paulo Borges, (2016), Terrain-dependant Control of Hexapod Robots using Vision, In proceedings of the International Symposium on Experimental Robotics (ISER 2016), Tokyo, Japan, October 2016.
[Abstract][Paper] Download citation [BibTex]
Photo gallery
|
Weaver on outdoor terrain |
Weaver on inclined outdoor terrain |
Weaver on multi-terrain testbed |
|
Weaver on multi-terrain testbed |
Weaver on multi-terrain testbed |
Weaver on multi-terrain testbed |
|
Weaver outdoors |
Staff discussing the results of the legged robot |
Weaver on multi-terrain testbed |
|
Weaver on outdoor terrain |
Weaver on outdoor terrain |
Weaver on outdoor terrain |
|
Weaver on outdoor terrain |
Weaver with research team members Timon and Marko |
Weaver with research team members Timon, Navinda and Marko |











Contact
For more information, please contact Navinda Kottege.