Paper: An informative path planning framework for UAV-based terrain monitoring
Unmanned aerial vehicles represent a new frontier in a wide range of monitoring and research applications. To fully leverage their potential, a key challenge is planning missions for efficient data acquisition in complex environments.
To address this issue, this article introduces a general informative path planning framework for monitoring scenarios using an aerial robot, focusing on problems in which the value of sensor information is unevenly distributed in a target area and unknown a priori.
The approach is capable of learning and focusing on regions of interest via adaptation to map either discrete or continuous variables on the terrain using variable-resolution data received from probabilistic sensors.
During a mission, the terrain maps built online are used to plan information-rich trajectories in continuous 3-D space by optimizing initial solutions obtained by a coarse grid search.
Extensive simulations show that our approach is more efficient than existing methods. We also demonstrate its real-time application on a photorealistic mapping scenario using a publicly available dataset and a proof of concept for an agricultural monitoring task.
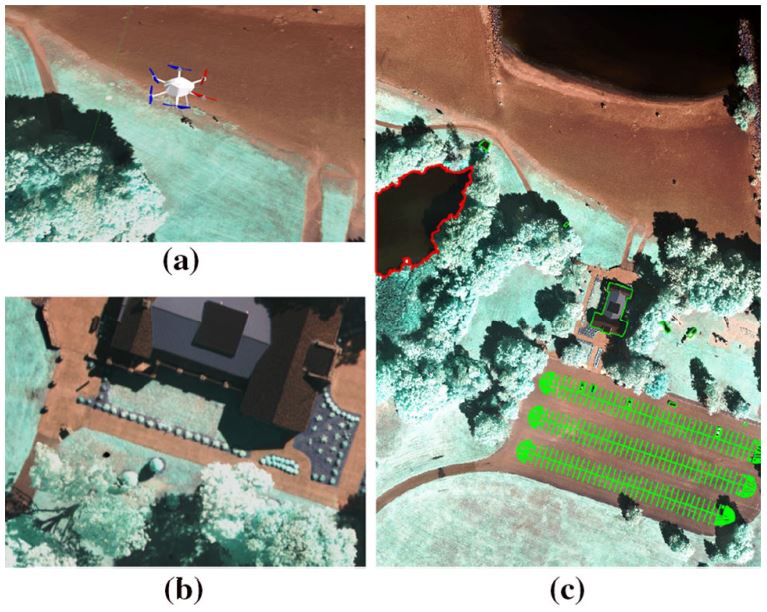
Fig. 11 Our photorealistic simulation setup in RotorS. a, b depict the AscTec Firefly UAV and the view from its on-board camera. c Shows an aerial view of the 200m×290m surveyed area (RIT-18 validation orthomosaic). The red and green lines annotate the two target classes for mapping using our approach: ‘Lake’ and ‘BRV’, respectively (Color figure online).
Marija Popovic, Teresa Vidal-Calleja, Gregory Hitz, Jen Jen Chung, Inkyu Sa, Roland Siegwart, Juan Nieto, An informative path planning framework for UAV-based terrain monitoring. Autonomous Robot, 2020
Download the full paper here.
For more information, contact us.
[jetpack_subscription_form title=”Subscribe to our News via Email” subscribe_text=”Enter your email address to subscribe and receive notifications of new posts by email.”]