Hovermap
Hovermap is an award-winning 3D lidar mapping and autonomy payload for industrial drones developed by our group. It provides SLAM-based LiDAR mapping, omni-directional collision avoidance, GPS-denied flight and advanced autonomy functions.
The Hovermap technology automates the collection of valuable data in underground areas too dangerous or difficult for people to survey or navigate, such as stopes or ore passes in mines. Drones installed with Hovermap can be deployed in GPS-denied environments without a human controller to create 3D maps, and record gas readings, videos and images.
Hovermap is now being commercialised by our spin-off company Emesent, which is also our partner in competing in the US Defense Advanced Projects Agency’s (DARPA) new Subterranean Challenge, which aims to develop innovative technologies to rapidly map, navigate and search underground environments.


Awards


Technical Specifications*
Hovermap Payload
The payload is a self-contained unit which can be mounted to suitable drones to provide advanced capabilities. As the LiDAR rotates it produces a full spherical field of view around the drone for mapping and collision avoidance. This makes it possible to map above, below and all around simultaneously so Hovermap is suitable for mapping indoors, underground and underneath overhanging structures such as bridges.
|
Hovermap Payload |
Hovermap Payload mounted to a drone |


Map Generation
LiDAR data is logged onboard and processed on a laptop after the flight to produce accurate 3D point clouds.
Applications
- Underground mine mapping – stopes, drives, ore passes etc.
- Asset management – telecom towers, transmission towers, wind turbines, bridges
- Construction
- Forensic crime scene mapping
Basic Specs
| Lidar Range | 100m |
| Angular Field of View | 360 x 360 degrees |
| Max Map Size | Unlimited* |
| Data Acquisition Speed | Up to 300, 000 points/sec |
| Recommended Flight Speed | up to 5 m/s (scene dependant) |
| Map Processing Time | approx 2 x the flight time |
| Power | max 90W |
| Weight | 2.25kg |
| Point Cloud Format | .laz, .ply |
*For more up-to-date specifications, please contact Emesent directly via emesent.io
Sample Applications
Underground Mining
This communications tower and support buildings were mapped with the Hovermap UAV lidar payload in a few minutes. Three vertical transects were performed at a distance of 4-6m from the tower.

Construction Site
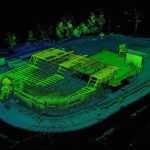
hovermap scan of construction site
This construction site has been mapped a number of times with the Hovermap UAV lidar payload. The successive scans are automatically aligned allowing accurate monitoring of changes over time. The entire 100 x 70m site is mapped in a single 10min flight by flying 4 GPS transects approximately 12m apart. For the first three scans the flight altitude was 10m above the terrain and for the 4th scan the altitude was adjusted to remain at least 4m clear of the building roof.
Industrial Shed
This industrial shed was mapped by flying the Hovermap UAV lidar payload indoors for a few minutes.

Liquid Storage Tanks

Hover map scans of Water Tank
Hover map scans of Water Tank
These liquid storage tanks were mapped using the Hovermap UAV lidar payload, each within a few minutes.
Parkes Radio Telescope

Hovermap scan of Parkes Radio Telescope
he Parkes Radio Telescope was mapped with the Hovermap UAV lidar payload by flying around it four times at different heights, in a total of 15 mins. Due to safety reasons it wasn’t possible to fly directly over the dish therefore, the receiver and supporting structure were mapped sparsely. The supporting structure of the dish was mapped from underneath, demonstrating the spherical field-of-view of the HoverMap payload.
Power Lines
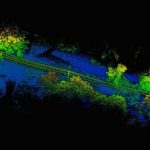
Hovermap scan of powerlines
Hovermap scan of power lines
Two sections of power distribution lines have been mapped with the Hovermap UAV lidar payload. These scans can be used to measure the distance between the power lines and the surrounding vegetation. The scans were obtained by flying within 5-8m of the power lines. Since Hovermap has a spherical field of view some of the lines could be mapped by flying underneath them.
Sydney Cricket Ground

hovermap scan of Sydney Cricket Ground
The Sydney Cricket Ground was mapped with the Hovermap UAV lidar payload by flying around the inside of the stadium once at around 5m above the lower seating area and a further two flights for the historic Members’ and Ladies’ Pavilions. For these pavilions three passes at different heights were performed, up to roof level. A slightly higher flight for the grandstand to the left of the Ladies Pavilion was also conducted. For safety reasons it wasn’t possible to fly higher and map the upper portions of the grandstands.The results from all the flights have been combined in the images below. The total flight time was approximately 40 mins.
*Hovermap conducting a scan of the Sydney Cricket Ground
For more up-to-date information and for all purchase enquiries, please contact Emesent directly via emesent.io
[jetpack_subscription_form title=”Subscribe to our News via Email” subscribe_text=”Enter your email address to subscribe and receive notifications of new posts by email.”]