DARPA SubT Challenge – CSIRO November 2018 Update
DARPA SubT Challenge – CSIRO November Update
Our CSIRO SubT teams met recently to review their progress in preparation for an upcoming internal testing day. The report and progress had everyone excited about our achievements to date.
On the technical side, in November we progressed in four major areas; detection of artefacts using our perception system in dark, underground environments; the development and testing of a new hexapod leg design; the implementation and testing of dynamic whole body control tested in simulation; plus the integration of our full navigation pipeline including SLAM on our hexapod model within the DARPA simulation environment.
On the 12th and 13th of December, the CSIRO Data61 SubT Challenge Team came together for a field deployment, in preparation for our qualification submission in December, and for the DARPA STIX (SubT Integration Exercises) event, in April 2019.
Prospective teams are required to demonstrate appropriate safety measures and baseline performance capabilities to be eligible to participate in events. All teams in both competitions (Systems and Virtual) must qualify for each event including the STIX, Circuit Events, and Final Event.
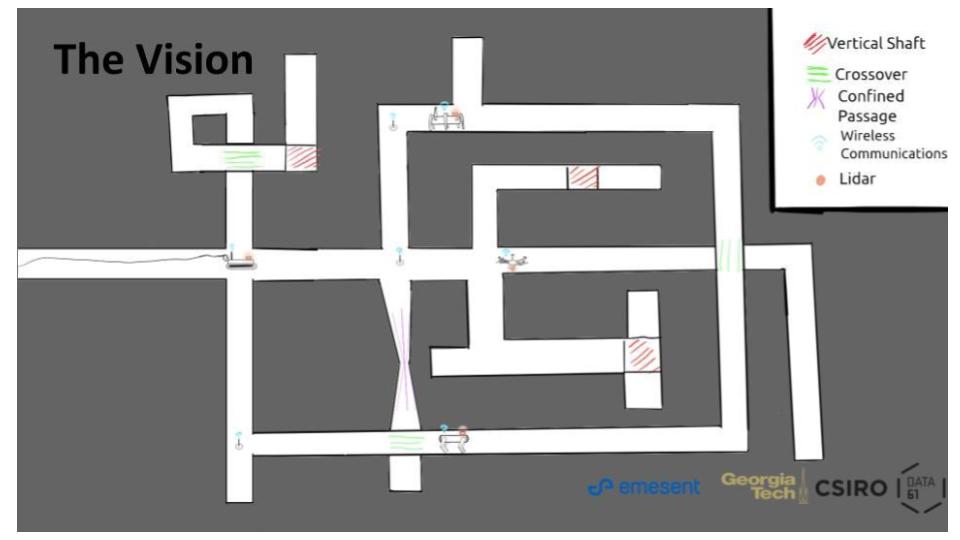
Below is an illustration of our vision of hexapod, quadruped and UAV working together.
Also, below is a video that depicts how the simulation of our new hexapod system has developed over the past few months. It shows our progress from a simple box with minimal physics to a fully dynamically simulated system running a state-of-the-art dynamic control structure.
It is also the first sneak preview at the design of our new hexapod platform.
For more information, contact us.
This research was developed with funding from the Defense Advanced Research Projects Agency (DARPA). The views, opinions and/or findings expressed are those of the author and should not be interpreted as representing the official views or policies of the Department of Defense or the U.S. Government.