A testbed has recently been introduced that evolves controllers for arbitrary hover-capable UAVs, with evaluations occurring directly on the robot. […]
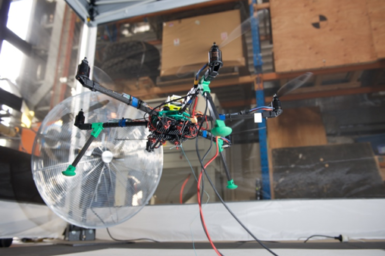
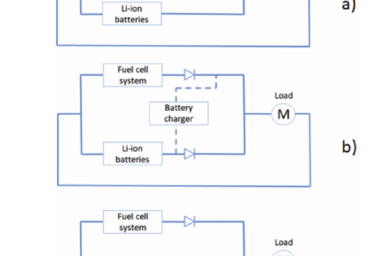
Experimental evaluation of a passive fuel cell/battery hybrid power system for an unmanned ground vehicle Unmanned vehicles are increasing the […]
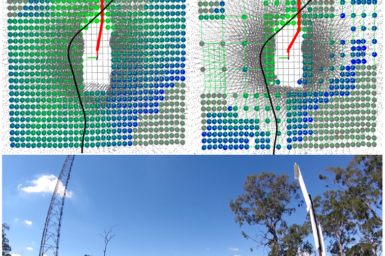
PhotogeoSeq+: Robust Photogeometric Localization over Time for Map-Centric Loop Closure Map-centric Simultaneous Localization And Mapping (SLAM) is emerging as an […]
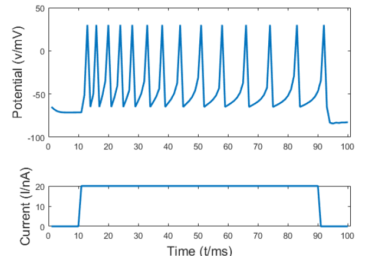
Evolving Spiking Neural Networks for Nonlinear Control Problems Spiking Neural Networks are powerful computational modelling tools that have attracted much […]
Safe terrain probing method for multi-legged robots operating on brittle surfaces Multi-legged robots working in challenging environments are often required […]
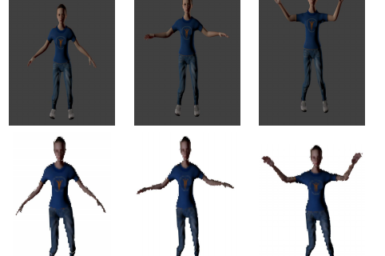
Skeleton Driven Non-Rigid Motion Tracking and 3D Reconstruction This paper presents a method which can track and 3D reconstruct the […]
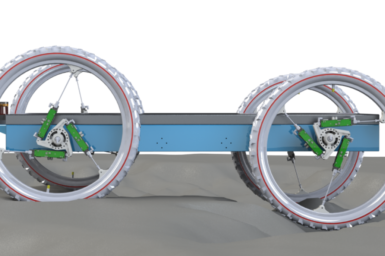
Dynamic Manipulation of Gear Ratio and Ride Height for a Novel Compliant Wheel using Pneumatic Actuators. This paper proposes a […]
After the success of ICRA 2018, which was held in Australia for the first time, our team is now gearing […]
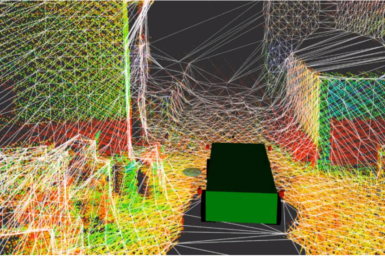
Optimization-Based Terrain Analysis and Path Planning in Unstructured Environments Accurate environment representation is one of the key challenges in autonomous ground […]
OVPC Mesh: 3D Free-space Representation for Local Ground Vehicle Navigation This paper presents a novel approach for local 3D environment representation for […]