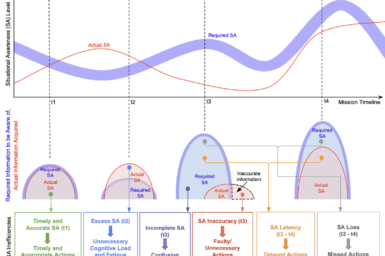
In a new paper published at ACM Transactions on Human-Robot Interaction, we present a framework explaining the dynamic nature of […]
For people new to human-robot interaction (HRI) research and user study evaluation, the experimental design process can be difficult to […]
When robots return from an autonomous mission or when an operator has stepped away for some time to attend to […]
RSS (Robotics: Science and Systems Conference) is arguably one of the most prestigious and selective conferences in robotics. This year […]
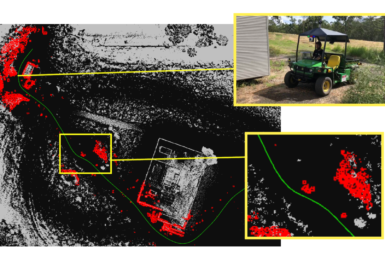
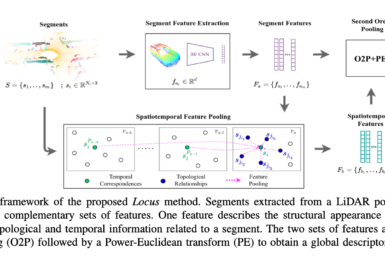
Locus: LiDAR-based Place Recognition using Spatiotemporal Higher-Order Pooling ICRA 2021 LiDAR-based Place Recognition enables the estimation of a globally consistent map […]
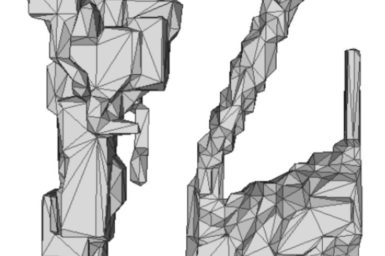
We compare two representations used to define the morphology of legs for a hexapod robot, which are subsequently 3D printed. […]
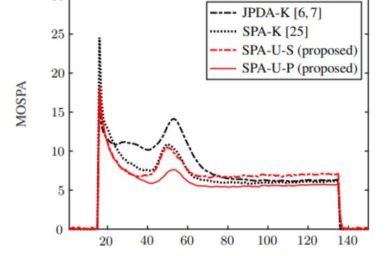
This paper presents a factor graph formulation and sum-product algorithm (SPA) for scalable detection and tracking of extended objects that […]
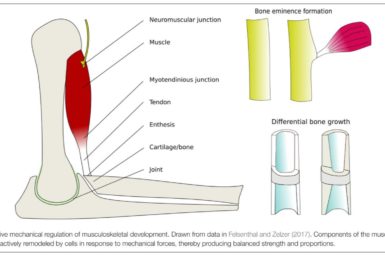
We present some currently unused morphogenetic mechanisms from evolutionary biology and guidelines for transfer to evolutionary robotics. DNA patterns providing […]
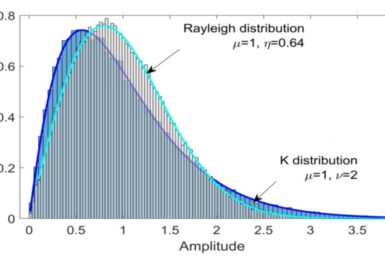
In this paper, we investigate the problem of detecting and tracking small targets in sea clutter using the Bernoulli Track-Before-Detect […]