Paper: Dynamic Manipulation of Gear Ratio and Ride Height for a Novel Compliant Wheel using Pneumatic Actuators
Dynamic Manipulation of Gear Ratio and Ride Height for a Novel Compliant Wheel using Pneumatic Actuators.
This paper proposes a novel configurable wheel that exhibits desired properties of varied radius wheels.
Positional manipulation of the centre hub is proposed and tested to achieve these desired characteristics of ‘virtual’ wheels in a physical system.
The centre hub is manipulated via the use of pneumatic actuators mounted to and constricted by the outer rim of the wheel, which allows for fast and accurate control to enable the vehicle ride height and gear ratio to be adjusted continuously and be maintained during the wheels’ full rotation.
Experiments are presented, validating this ability of the system. We envision uses for this system to extend from off-road robotics to space exploration as these wheels exhibit novel characteristics not demonstrated by other platforms.
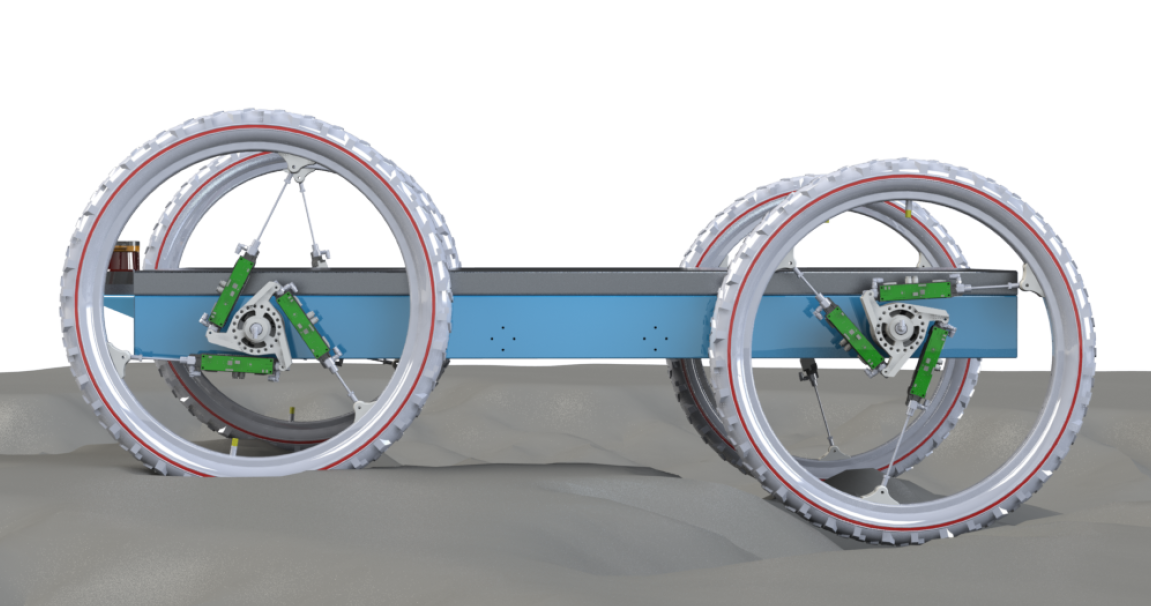
Fig. 1. Possible application of this research, utilising four individual systems for an autonomous ground vehicle traversing non-uniform terrain.
Tim Hojnik, Paul Flick, Tirthankar Bandyopadhyay, Jonathan Roberts. ICRA 2019.
To learn more, contact us.
[jetpack_subscription_form title=”Subscribe to our News via Email” subscribe_text=”Enter your email address to subscribe and receive notifications of new posts by email.”]