Paper: Evolving Spiking Neural Networks for Nonlinear Control Problems
Evolving Spiking Neural Networks for Nonlinear Control Problems
Spiking Neural Networks are powerful computational modelling tools that have attracted much interest because of the bioinspired modelling of synaptic interactions between neurons.
Most of the research employing spiking neurons has been non-behavioural and discontinuous.
Comparatively, this paper presents a recurrent spiking controller that is capable of solving nonlinear control problems in continuous domains using a popular topology evolution algorithm as the learning mechanism.
We propose two mechanisms necessary to the decoding of continuous signals from discrete spike transmission:
(i) a background current component to maintain frequency sufficiency for spike rate decoding, and
(ii) a general network structure that derives strength from topology evolution.
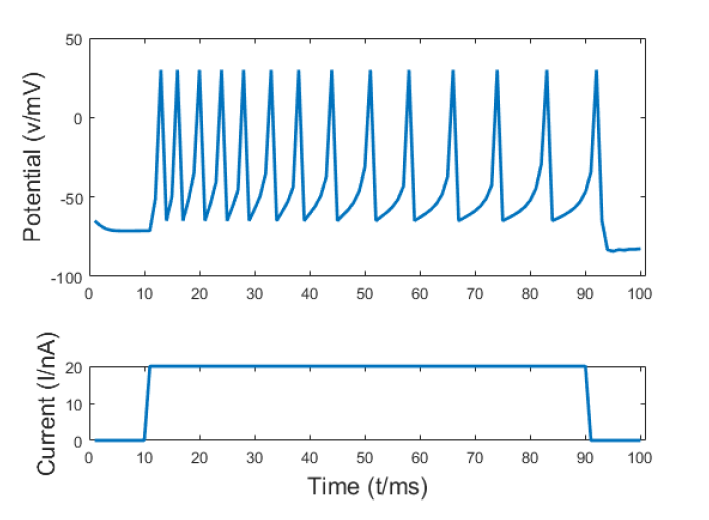
Fig. 1. Voltage response of an Izhikevich neuron to a square wave current signal I corresponds to a = 0:02; b = 0:2; c = ?65; d = 2 and vt = 30 mV.
We demonstrate that the proposed spiking controller can learn significantly faster to discover functional solutions than sigmoidal neural networks in solving a classic nonlinear control problem.
Evolving Spiking Neural Networks for Nonlinear Control Problems. Howard, David; Garratt, Matthew; Anavatti, Sreenatha; Qiu, Huanneng. Evolving Spiking Neural Networks for Nonlinear Control Problems. In: IEEE SSCI 2018 (Symposium Series on Computational Intelligence); 18th November 2018; Bengaluru India. IEEE; 2018. 1-6. 2018-11-25 | Publication type: Conference Material
Download the full paper here.
For more information, contact us.
[jetpack_subscription_form title=”Subscribe to our News via Email” subscribe_text=”Enter your email address to subscribe and receive notifications of new posts by email.”]