Paper: OVPC Mesh: 3D Free-space Representation for Local Ground Vehicle Navigation
OVPC Mesh: 3D Free-space Representation for Local Ground Vehicle Navigation
This paper presents a novel approach for local 3D environment representation for autonomous unmanned ground vehicle (UGV) navigation called On Visible Point Clouds Mesh (OVPC Mesh).
Our approach represents the surrounding of the robot as a watertight 3D mesh generated from local point cloud data in order to represent the free space surrounding the robot.
It is a conservative estimation of the free space and provides a desirable trade-off between representation precision and computational efficiency, without having to discretize the environment into a fixed grid size. Our experiments analyze the usability of the approach for UGV navigation in rough terrain, both in simulation and in a fully integrated real-world system.
Additionally, we compare our approach to well-known state-ofthe-art solutions, such as Octomap and Elevation Mapping and show that OVPC Mesh can provide reliable 3D information for trajectory planning while fulfilling real-time constraints.
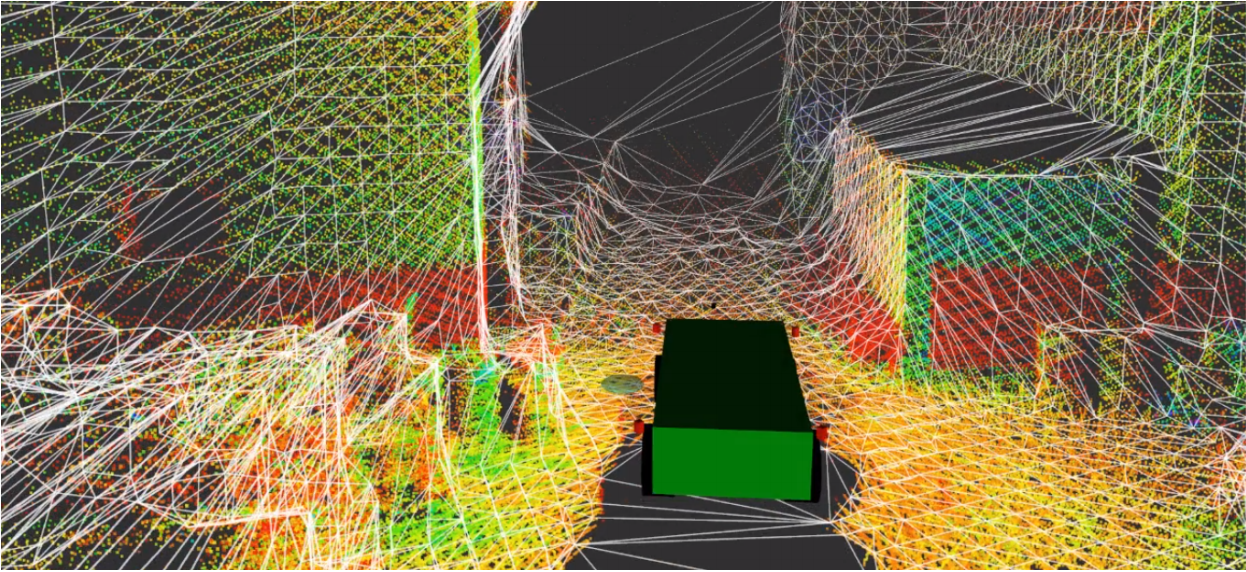
Fig. 1. Raw local point cloud (colored by intensity) obtained from a 3D LiDAR and the extracted watertight mesh (white edges). The mesh encapsulates the robot and gives a conservative three-dimensional free-space estimate of the local robot surrounding. This environment representation can also be used for rough-terrain motion planning.
Fabio Ruetz, Emili Hernandez, Mark Pfeiffer, Helen Oleynikova, Mark Cox, Thomas Lowe, Paulo Borges. ICRA 2019.
To learn more, contact us.
[jetpack_subscription_form title=”Subscribe to our News via Email” subscribe_text=”Enter your email address to subscribe and receive notifications of new posts by email.”]