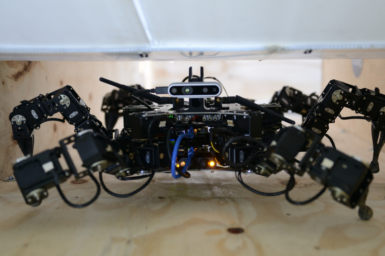
Walking Posture Adaptation for Legged Robot Navigation in Confined Spaces Legged robots have the ability to adapt their walking posture to […]
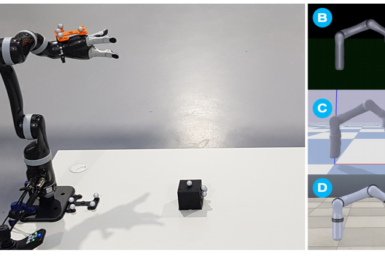
Quantifying the Reality Gap in Robotic Manipulation Tasks We quantify the accuracy of various simulators compared to a real world robotic […]
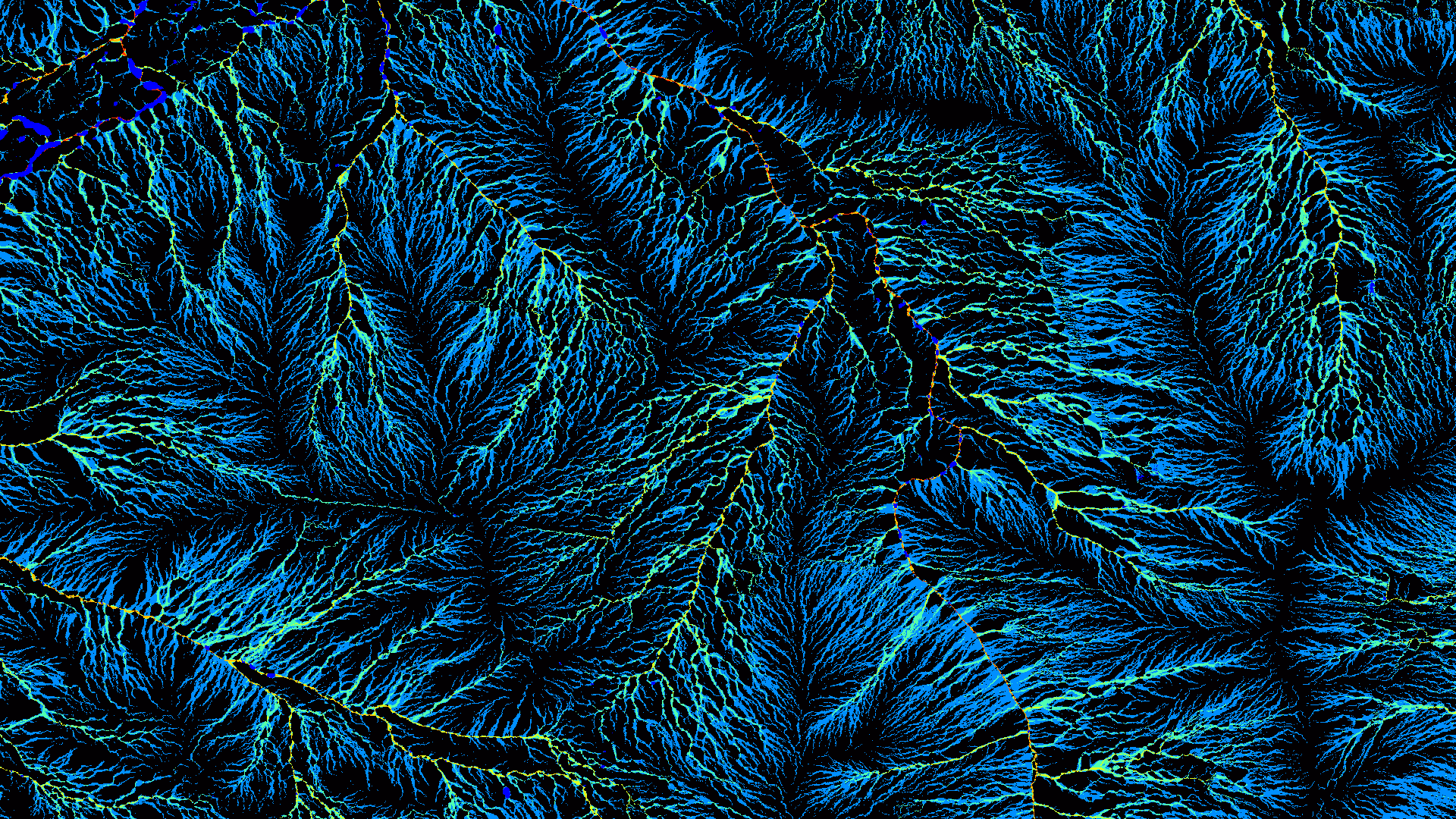
Local Descriptor for Robust Place Recognition using LiDAR Intensity Place recognition is a challenging problem in mobile robotics, especially in […]
Researchers from Australia’s national science agency, CSIRO, have offered a bold glimpse into what the robots of the future could […]
Towards the Targeted Environment-Specific Evolution of Robot Components This research considers the task of evolving the physical structure of a robot […]
Some of our experts are getting ready for Madrid and IROS 2018. The 2018 IEEE/RSJ International Conference on Intelligent Robots […]
IROS 2018 paper: Paper: A Software Framework for Planning under Partial Observability Planning under partial observability is both challenging and critical […]
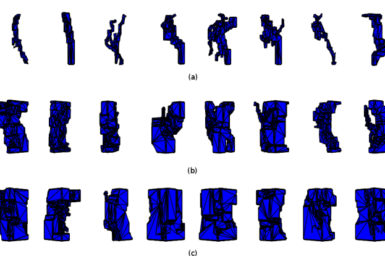
IROS 2018 Paper: Data Driven Modeling of Shape Recovery Behavior in SMP Laminates Newly discovered and experimented Shape Memory Polymers (SMPs) […]
IROS 2018 Paper: Magneto: A Versatile Multi-Limbed Inspection Robot Inspection of complex industrial structures has always been challenging, especially in […]
IROS 2018 paper: PoseMap: Lifelong, Multi-Environment 3D LiDAR Localization Reliable long-term localization is key for robotic systems in dynamic environments. In a […]