Paper: Towards the Targeted Environment-Specific Evolution of Robot Components
Towards the Targeted Environment-Specific Evolution of Robot Components
This research considers the task of evolving the physical structure of a robot to enhance its performance in various environments, which is a significant problem in the field of Evolutionary Robotics.
Inspired by the fields of evolutionary art and sculpture, we evolve only targeted parts of a robot, which simplifies the optimisation problem compared to traditional approaches that must simultaneously evolve both (actuated) body and brain.
Exploration fidelity is emphasised in areas of the robot most likely to benefit from shape optimisation, whilst exploiting existing robot structure and control.
Our approach uses a Genetic Algorithm to optimise collections of Bezier splines that together define the shape of a legged robot’s tibia, and leg performance is evaluated in parallel in a high-fidelity simulator.
The leg is represented in the simulator as 3D-printable file, and as such can be readily instantiated in reality. Provisional experiments in three distinct environments show the evolution of environment-specific leg structures that are both high-performing and notably different to those evolved in the other environments.
This proof-of-concept represents an important step towards the environment-dependent optimisation of performance-critical components for a range of ubiquitous, standard, and already-capable robots that can carry out a wide variety of tasks.
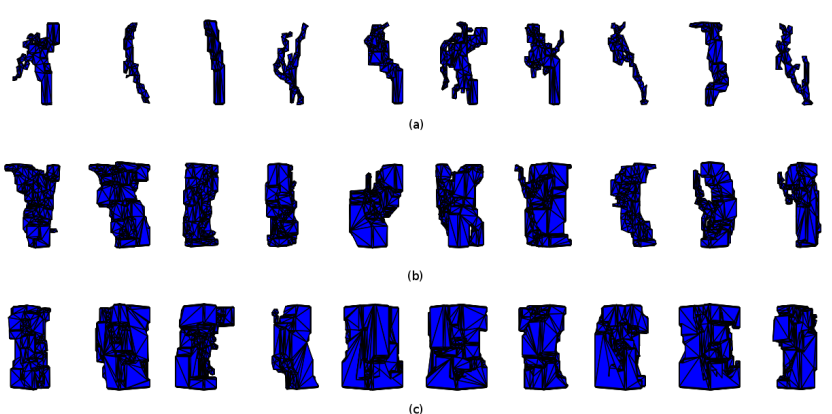
(a) Legs evolved for deformable terrain model with the characteristics of soil, (b) legs evolved for a particle-based
solid model representing loose gravel, (c) legs evolved for a particle-based fluid model that acts like water.
Jack Collins, Wade Geles, David Howard, and Frederic Maire. 2018. Towards the Targeted Environment-Specific Evolution of Robot Components. In GECCO ’18: Genetic and Evolutionary Computation Conference, July 15–19, 2018, Kyoto, Japan. ACM, 8 pages. https://doi.org/10.1145/3205455.3205541
Click here to download the paper.
For more information, contact Dr David Howard.