Paper: Walking Posture Adaptation for Legged Robot Navigation in Confined Spaces
Walking Posture Adaptation for Legged Robot Navigation in Confined Spaces
Legged robots have the ability to adapt their walking posture to navigate confined spaces due to their high degrees of freedom. However, this has not been exploited in most common multilegged platforms.
This paper presents a deformable bounding box abstraction of the robot model, with accompanying mapping and planning strategies, that enable a legged robot to autonomously change its body shape to navigate confined spaces.
The mapping is achieved using robot-centric multielevation maps generated with distance sensors carried by the robot. The path planning is based on the trajectory optimisation algorithm CHOMP which creates smooth trajectories while avoiding obstacles.
The proposed method has been tested in simulation and implemented on the hexapod robot Weaver, which is 33 cm tall and 82 cm wide when walking normally.
We demonstrate navigating under 25 cm overhanging obstacles, through 70 cm wide gaps and over 22 cm high obstacles in both artificial testing spaces and realistic environments, including a subterranean mining tunnel.
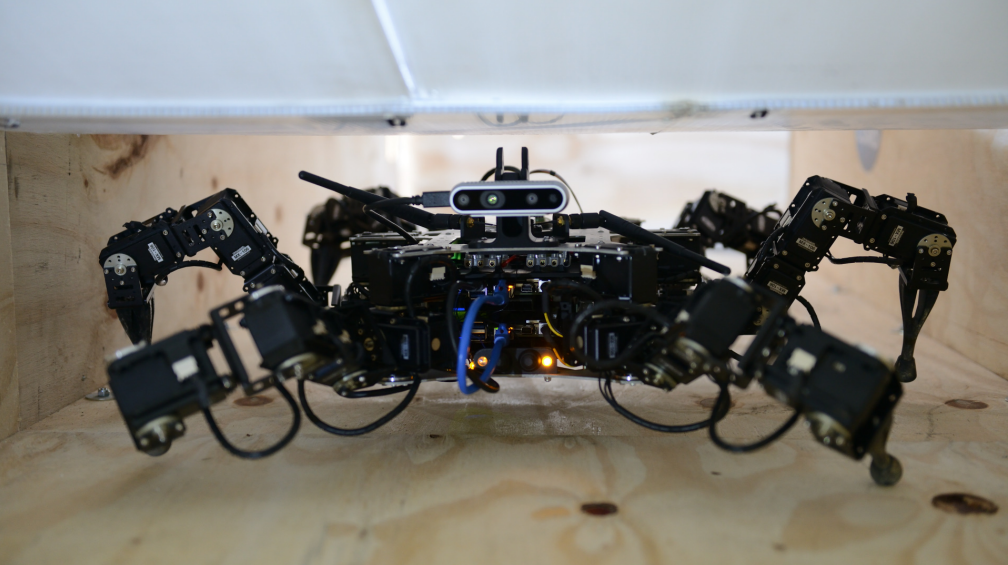
The hexapod robot Weaver adapting its walking posture to pass under an overhanging obstacle with 25 cm clearance.
Buchanan, Russell; Bandyopadhyay, Tirthankar; Bjelonic, Marko; Wellhausen, Lorenz; Hutter, Marco; Kottege, Navinda. Walking Posture Adaptation for Legged Robot Navigation in Confined Spaces. Robotics and Automation Letters. 2019; 0(01):8. https://doi.org/10.1109/LRA.2019.2899664
Download the paper here.
To learn more, contact us.
[jetpack_subscription_form title=”Subscribe to our News via Email” subscribe_text=”Enter your email address to subscribe and receive notifications of new posts by email.”]