Paper: Quantifying the Reality Gap in Robotic Manipulation Tasks
Quantifying the Reality Gap in Robotic Manipulation Tasks
We quantify the accuracy of various simulators compared to a real world robotic reaching and interaction task. Simulators are used in robotics to design solutions for real world hardware without the need for physical access.
The ‘reality gap’ prevents solutions developed or learnt in simulation from performing well, or at at all, when transferred to real-world hardware.
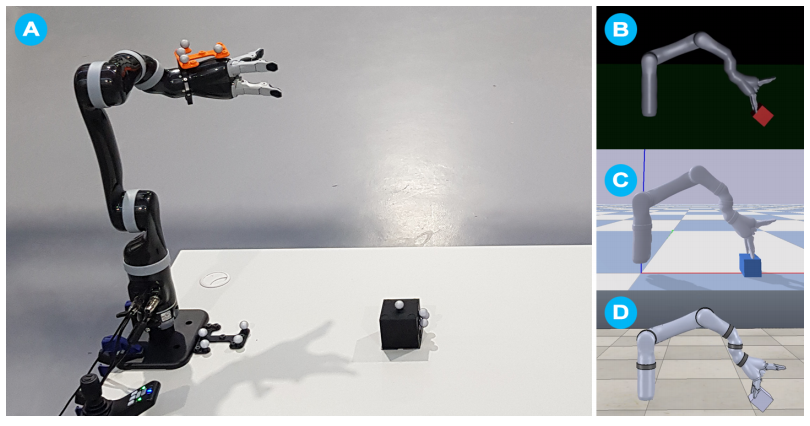
Fig. 1. Real-World and simulated environments with the Kinova arm and cube visualised. (A) Real-world setup with tracking markers attached to dynamic elements; (B) the MuJoCo environment; (C) the PyBullet environment; (D) the V-Rep environment.
Making use of a Kinova robotic manipulator and a motion capture system, we record a ground truth enabling comparisons with various simulators, and present quantitative data for various manipulation-oriented robotic tasks.
We show the relative strengths and weaknesses of numerous contemporary simulators, highlighting areas of significant discrepancy, and assisting researchers in the field in their selection of appropriate simulators for their use cases.
Jack Collins, David Howard, and Jurgen Leitner. ICRA 2019.
To learn more, contact us.
[jetpack_subscription_form title=”Subscribe to our News via Email” subscribe_text=”Enter your email address to subscribe and receive notifications of new posts by email.”]