CSIRO.au
Data61
Data61 projects & tools
Skip to content
Skip to search
Data61 website
Research
Analytics
Cyber-Physical Systems Research Groups
Decision Sciences
Engineering & Design
Software and Computational Systems
Archived
Tools
Home
Cyber-Physical Systems Research Groups
CSIRO.au
Data61
Search
Search
Analytics
Page 2
#Analytics
Riemannian Geometry
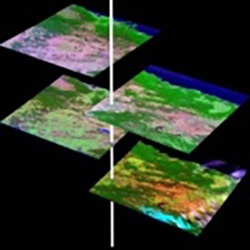
Geospatial Data Analysis
Road Image Database
AutoMap Datasets and Code
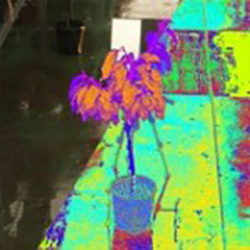
High Performance Imaging
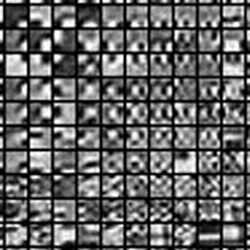
Dictionary Learning for Vision
Vibromat
Distributed & Large Scale Vision
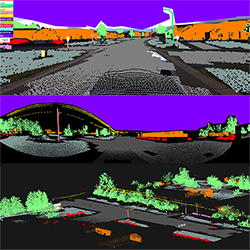
Object & Scene Segmentation
<
1
2
3
4
…
6
>