Riemannian Geometry
The Riemannian Geometry Team (RGT) pursues fundamental research based on the notion of Riemannian geometry to achieve accurate and discriminative models for visual information.
RGT has investigated several central research questions in vision and developed efficient solutions for them. Examples are:
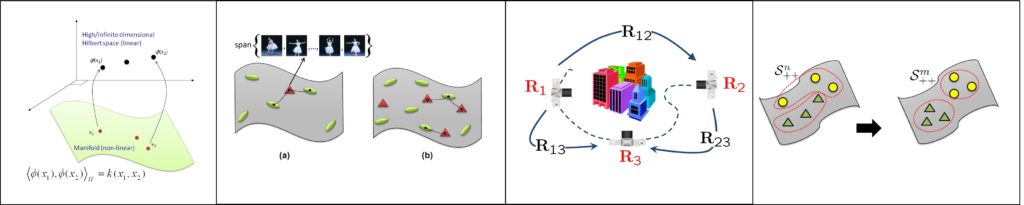
Kernel methods on Riemannian manifolds: Kernel methods in Euclidean spaces have shown to be extremely successful in addressing a wide range of classification and clustering problems. For example, Support Vector Machines is one of the most popular kernel based classification methods. However, such techniques cannot be applied verbatim on complex topologies, in particular curved and nonlinear Riemannian manifolds. RGT has developed new theories towards generalizing kernel methods on Riemannian manifolds and has used the development to address various vision tasks.
Coding and dictionary learning on Riemannian manifolds: In computer vision, coding and dictionary learning lead to robust and discriminative descriptors for images and videos. Sparse representation is one example of such coding schemes. The previous techniques developed in this area apply only in Euclidean spaces and hence are limited. RGT has developed new techniques to extend the concept of coding and dictionary learning to Riemannian manifolds.
Optimisation on Riemannian manifolds: A fundamental task in many vision problems involves minimization of a cost function. Such optimisation techniques have been developed assuming Euclidean space is the underlying search space. RGT has successfully extended several optimisation techniques to work on Riemannian manifolds.