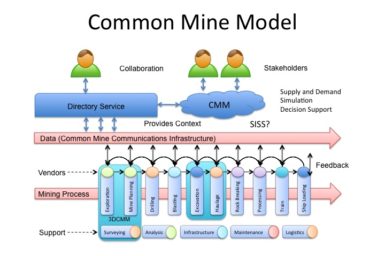
In June 2012 we submitted the Common Mine Model (CMM) proposal to AMIRA. The role of the Common Mine Model […]
In May 2008 we submitted the Surface Mine Automation (SMA) framework proposal to AMIRA. For more than two decades there […]
Together with colleagues from across the ICT Centre as well as CSIRO's Division of Exploration and Mining, researchers from the […]
This project developed and demonstrated a system that is able to simultaneously track the bucket of a mining excavator and […]
With funding from the Australian coal industry's research program ACARP, CSIRO is collaborating with the Cooperative Research Centre for Mining, […]
The Mining Automation team at QCAT has been developing high-technology systems to assist dragline operators and mine planners since 1994. […]
The aim of this project was to demonstrate the feasibility of tele-operation of a dragline for large-scale regolith excavation for […]
An LHD is a mid-sized (up to 60 tonnes) underground mining vehicle that loads, hauls and dumps (hence its name) […]
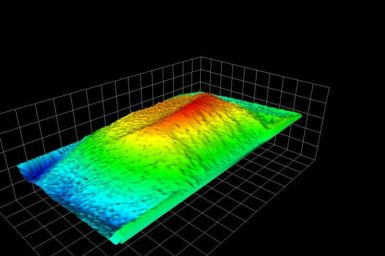
CSIRO has developed a system called Trayscan to measure the in-situ volume of material contained within the tray of moving […]
The aim of this project was to automate the charging process in underground mining. This process involves placing primer and […]