Dragline on the Moon
The aim of this project was to demonstrate the feasibility of tele-operation of a dragline for large-scale regolith excavation for off-world habitat construction and mineral extraction.
The realization of humans living and working off-world poses significant challenges including scales of operation that to date has never been undertaken in any space exploration program. The key issues for off-world habitation are the construction of living quarters prior to human settlement and the extraction of resources such as water and key metalliferous minerals that can be used for fuel and construction materials.
To protect humans from the extreme environmental conditions that they will be exposed to on the lunar surface, it is generally accepted that the living habitats will have to be buried beneath the surface. Additionally, water and other mineral resources to support planetary exploration exist in small concentrations within the surface regolith. Therefore, to achieve habitat construction and mineral extraction, large-scale surface and underground mining operations will be required.
To date, off-world excavation tasks have been for scientific discovery with the largest amount of material removal being conducted during the Apollo missions where tens of kilograms of material was obtained over many days of operation. This was achieved by direct human involvement and collection. Today, typical excavation tasks are of much smaller scale (grams) such as the sampling conducted by the Mars robotic exploration rovers. In order to realize off-world habitation, a major challenge is to extend excavation tasks from the gram and kilogram scale to the thousands of tonnes scale – a scale up by six orders of magnitude.
As there will initially be no direct human interaction with the machines, the systems will be robotic in nature with levels of autonomy ranging from shared to fully autonomous required. As operations become larger, more time consuming, and with greater round-trip latencies, the level of autonomy will need to increase. Therefore, the primary focus of our research project is to investigate and develop algorithms that allow robotic machine control and levels of autonomy that allow reliable, safe and efficient large-scale excavation and planning operations given these set of challenges.
The primary difference between earth-based and off-world mining operations is the time latency, the level of allowable/desirable autonomy, and the interaction with human operators and other personnel and equipment. In earth-based operations, latency and bandwidth is generally not an issue. Off-world, this is important as latencies over 2 seconds can make direct tele-operation difficult, if not impossible. For earth based operations, there is a general reluctance to adopt completely autonomous systems. However, off-world a greater reliance on autonomy is required. One important aspect of CSIRO’s research has been the fact that there is generally interaction between the human, the machine and other equipment.
The research has focused on a particular 1/7th scale dragline excavator which is believed similar size to that required for lunar habitat excavation and made capable of autonomous control (see Figure 1). To date, systems have been put in place to allow remote operation of the vehicle from anywhere in the world (see Figure 2) as well as algorithm development and implementation for complete autonomous digging and dumping of material taking into account machine and terrain constraints.

Figure 1. 1/7th scale dragline at Redbank
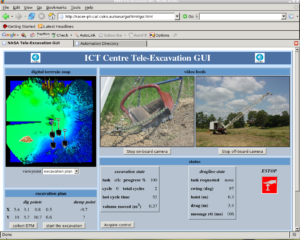
Figure 2. Remote User interface
Contact us to learn more.
[jetpack_subscription_form title=”Subscribe to our News via Email” subscribe_text=”Enter your email address to subscribe and receive notifications of new posts by email.”]