CSIRO.au
Data61
Events
Contact us
Gallery
Robotics
Skip to content
Skip to search
About us
Research & Technology
Projects
Publications
Code, Software and Datasets
Awards
News
Work with us
Home
Contact us
Research & Technology
Events
About us
Research & Technology
News
Work with us
Photo Gallery
CSIRO.au
Data61
Events
Contact us
Gallery
Search
Search
icra2019
#icra2019
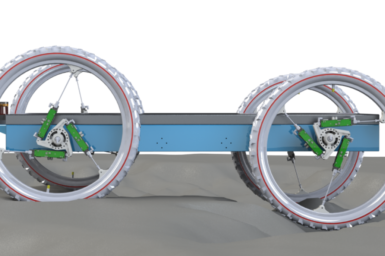
Paper: Dynamic Manipulation of Gear Ratio and Ride Height for a Novel Compliant Wheel using Pneumatic Actuators
Montreal bounded – ICRA 2019
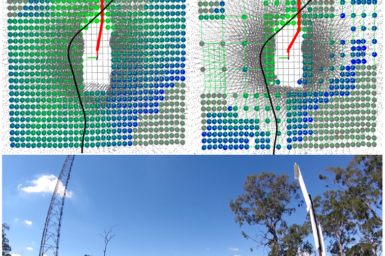
Paper: Optimization-Based Terrain Analysis and Path Planning in Unstructured Environments
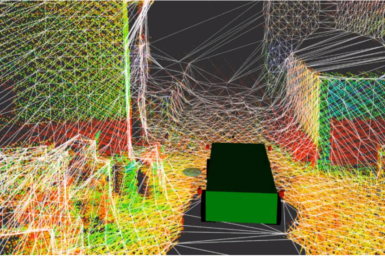
Paper: OVPC Mesh: 3D Free-space Representation for Local Ground Vehicle Navigation
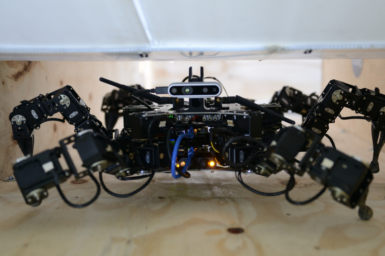
Paper: Walking Posture Adaptation for Legged Robot Navigation in Confined Spaces
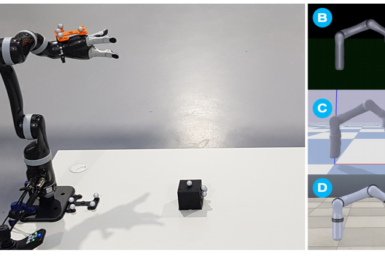
Paper: Quantifying the Reality Gap in Robotic Manipulation Tasks
Paper: Local Descriptor for Robust Place Recognition using LiDAR Intensity