We are looking forward to ACRA 2020 starting in less than 2 weeks, running virtually from Brisbane 8-10 December! This […]
This year, ACRA is being jointly organised by ARAA and our group, and we are pleased to inform that registrations […]
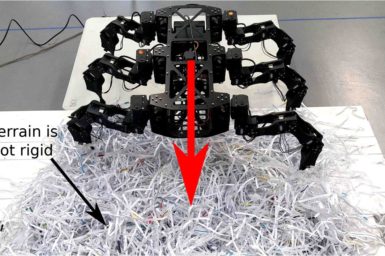
Multi-legged robots are effective at traversing rough terrain. However, terrains that include collapsible footholds (i.e. regions that can collapse when […]
CSIRO Data61 AgTech Cluster for Robotics and Autonomous Systems will showcase at two stands some of the latest AgTech technologies […]
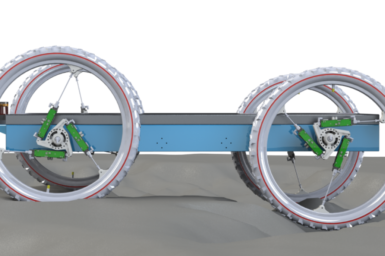
Dynamic Manipulation of Gear Ratio and Ride Height for a Novel Compliant Wheel using Pneumatic Actuators. This paper proposes a […]
After the success of ICRA 2018, which was held in Australia for the first time, our team is now gearing […]
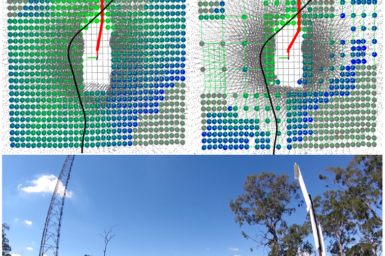
Optimization-Based Terrain Analysis and Path Planning in Unstructured Environments Accurate environment representation is one of the key challenges in autonomous ground […]
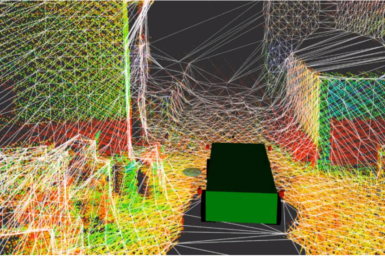
OVPC Mesh: 3D Free-space Representation for Local Ground Vehicle Navigation This paper presents a novel approach for local 3D environment representation for […]
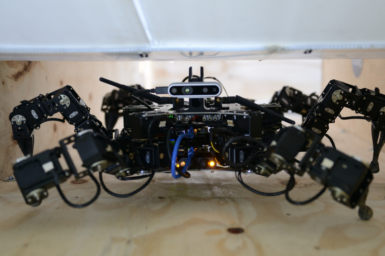
Walking Posture Adaptation for Legged Robot Navigation in Confined Spaces Legged robots have the ability to adapt their walking posture to […]
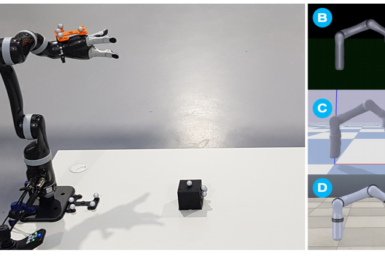
Quantifying the Reality Gap in Robotic Manipulation Tasks We quantify the accuracy of various simulators compared to a real world robotic […]