Syropod High-level Controller (SHC) is a versatile controller capable of generating body poses and gaits for quasi-static multilegged robots. It […]
Granular materials, such as sands, soils, grains and powders, are ubiquitous in both natural and artificial systems. They are core to […]
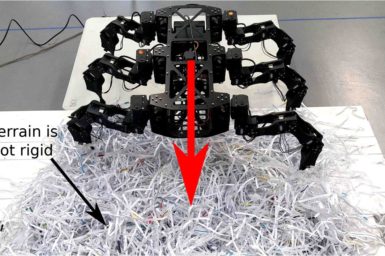
Multi-legged robots are effective at traversing rough terrain. However, terrains that include collapsible footholds (i.e. regions that can collapse when […]
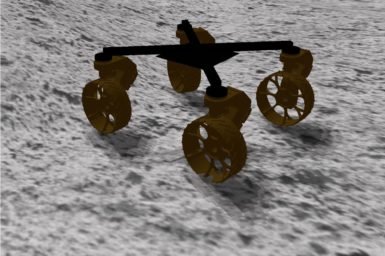
Travel over sloped terrain is difficult as an incline changes the interaction between each wheel and the ground resulting in […]
Paper: Spatiotemporal Camera-LiDAR Calibration: A Targetless and Structureless Approach To appear in IEEE RAL and presented at ICRA 2020 The […]
The Poisson multi-Bernoulli mixture (PMBM) and the multi-Bernoulli mixture (MBM) are two multi-target distributions for which closed-form filtering recursions exist. […]
The concept of continuous-time trajectory representation has brought increased accuracy and efficiency to multi-modal SLAM. However, regardless of these advantages, […]
Accurate extension control of linear actuators is difficult due to a variety of factors such as loading, friction, external forces, […]
Congratulations to our team members: Troy Cordie, Ryan Steindl, Ross Dungavell and Tirthankar Bandyopadhyay for having their paper selected as […]
The Lobula giant movement detector (LGMD) is an identified neuron of the locust that detects looming objects and triggers the […]