Modular Field Robots for Extraterrestrial Exploration – IAC2019 finalist

Congratulations to our team members: Troy Cordie, Ryan Steindl, Ross Dungavell and Tirthankar Bandyopadhyay for having their paper selected as a finalist in the interactive presentation session during the 70th International Astronautical Congress IAC2019 in Washington, D.C. last week.
Represented by PhD Candidate Troy Cordie, the team happily celebrates this achievement!
Paper: Modular Field Robots for Extraterrestrial Exploration
Modular design methodology enables rapid reconfigurability for functional changes, robustness to failures and space utilisation for transportation. In the case of planetary exploration robots, there is promise in modular robots that are able to reconfigure itself for exploration of unknown terrains.
This paper presents a design and controller architecture for modular field robots that can be rapidly assembled in a variety of functional configurations. A key challenge of building a functional robot out of modular units is the ability to seamlessly add, remove and replace individual units to enable functional improvements as well as adapt to terrain requirements. An added benefit of modularity is the ability for graceful degradation through reconfigurability such as detaching a module or adaptation of motion models to actuator failure.
We present a representative modular wheel design and a distributed controller architecture able to create a range of bespoke multi-wheeled configurations capable of traversal on a variety of terrains during simulated failure scenarios.
The self-contained wheeled unit has energy, computation communication, and actuation modules and does not require any modification or physical customization in the field during deployment enabling a seamless plug and play behavior.
The hierarchical control structure runs a body controller node that decomposes a whole body motion requested from a higher level planner to generate a sequence of actuation goals for each of the modules, while a local controller node running on each of the modules ensures that the desired actuation is adapted to the configuration, load and terrain characteristics.
We present results of the controller adapting to multiple terrains and failure modes with various.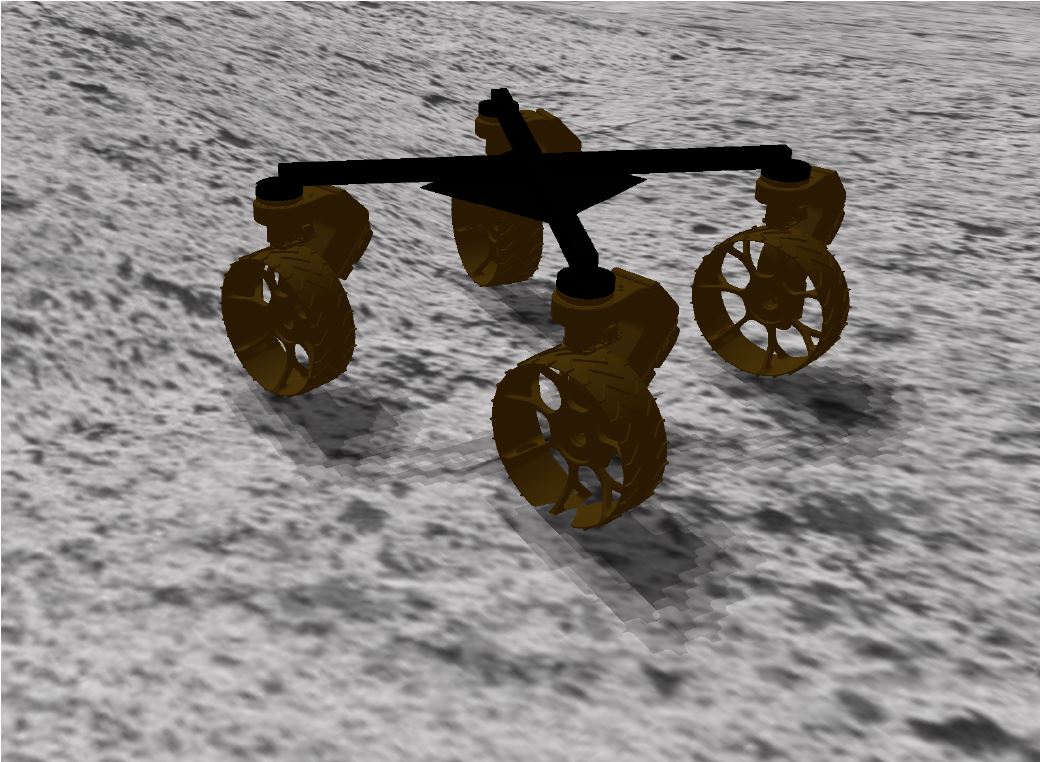
Download the full paper here.
For more information, contact us.
[jetpack_subscription_form title=”Subscribe to our News via Email” subscribe_text=”Enter your email address to subscribe and receive notifications of new posts by email.”]2019_IAC_ModularSpaceRobots