Paper: Spatiotemporal Camera-LiDAR Calibration: A Targetless and Structureless Approach
Paper: Spatiotemporal Camera-LiDAR Calibration: A Targetless and Structureless Approach To appear in IEEE RAL and presented at ICRA 2020
The demand for multimodal sensing systems for robotics is growing due to the increase in robustness, reliability and accuracy offered by these systems. These systems also need to be spatially and temporally co-registered to be effective.
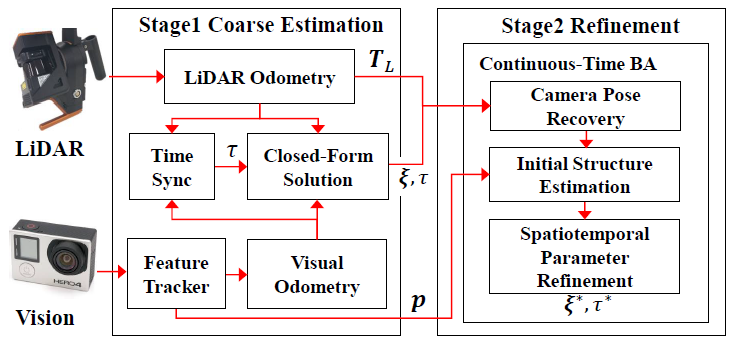
Fig. 1. Block Diagram of the proposed spatiotemporal camera-LiDAR calibration system.
In this paper, we propose a targetless and structureless spatiotemporal camera-LiDAR calibration method. Our method combines a closed-form solution with a modified structureless bundle adjustment where the coarse-to-fine approach does not {require} an initial guess on the spatiotemporal parameters.
Also, as 3D features (structure) are calculated from triangulation only, there is no need to have a calibration target or to match 2D features with the 3D point cloud which provides flexibility in the calibration process and sensor configuration.
We demonstrate the accuracy and robustness of the proposed method through both simulation and real data experiments using multiple sensor payload configurations mounted to hand-held, aerial and legged robot systems. Also, qualitative results are given in the form of a colorized point cloud visualization.
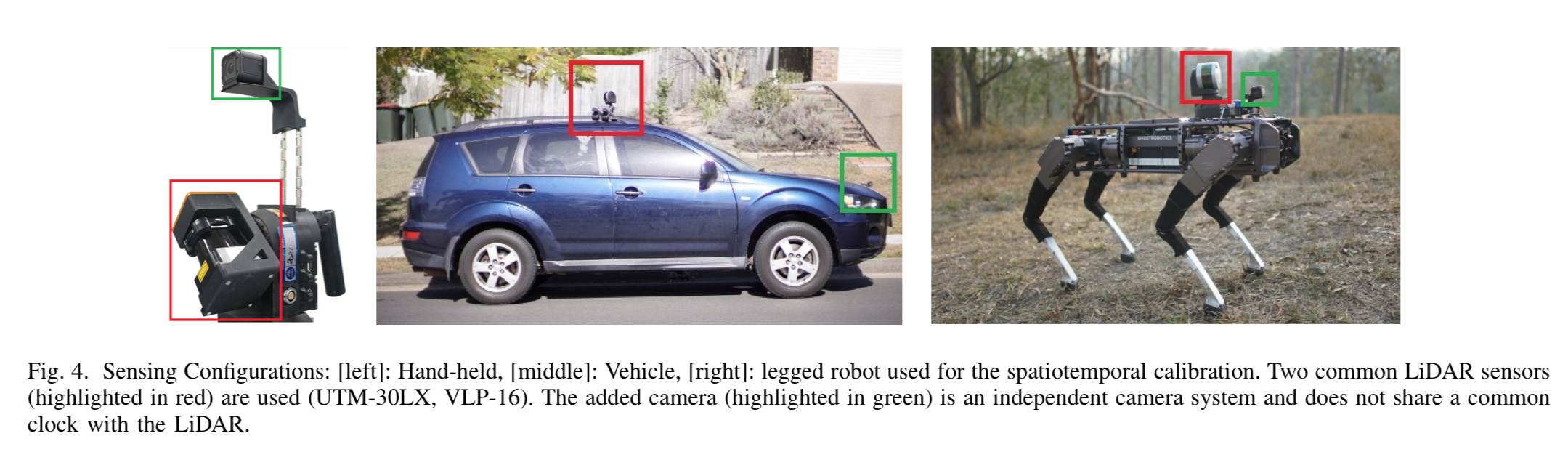
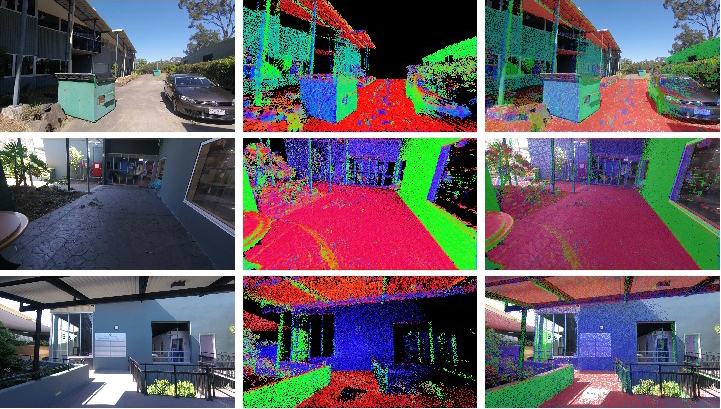
Fig. 10. (left): captured images, (middle): surfel clouds projected on the
image, (right): blend of the captured images and projected surfel clouds. The color in the surfel clouds represents normal directions.
Chanoh Park, Peyman Moghadam, Soohwan Kim, Sridha Sridharan, Clinton Fookes. Spatiotemporal Camera-LiDAR Calibration: A Targetless and Structureless Approach. in IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 1556-1563, April 2020.
doi: 10.1109/LRA.2020.2969164
Download the full paper here.
For more information, contact Dr Peyman Moghadam .
[jetpack_subscription_form title=”Subscribe to our News via Email” subscribe_text=”Enter your email address to subscribe and receive notifications of new posts by email.”]