Published by The Australian 29 January 2013 .
The I3Hub is an initiative to create an independent, not-for-profit network of I3 (Industrial Internet Innovation) Hubs. Its vision is for […]
In Nov 2014, we submitted the IMCRC Proposal (Innovative Manufacturing). We are proposing to lead Program 3, Automated and Assistive […]
In Aug 2013 we submitted the MIICRC Proposal (Manufacturing Industry Innovation) We were leading RESEARCH PROGRAM 2: AGILE MANUFACTURING This program will investigate […]
Zebedee: Design of a Spring-Mounted 3-D Range Sensor with Application to Mobile Mapping Three-dimensional perception is a key technology for many […]
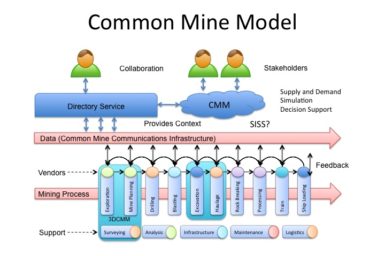
In June 2012 we submitted the Common Mine Model (CMM) proposal to AMIRA. The role of the Common Mine Model […]
Continuous 3D scan-matching with a spinning 2D laser Scan-matching is a technique that can be used for building accurate maps […]
In May 2008 we submitted the Surface Mine Automation (SMA) framework proposal to AMIRA. For more than two decades there […]
The aim of this project was to demonstrate the feasibility of tele-operation of a dragline for large-scale regolith excavation for […]