Our robot team has already hit the road headed to Satsop Business Park in Elma, Washington for the DARPA Urban […]
The concept of continuous-time trajectory representation has brought increased accuracy and efficiency to multi-modal SLAM. However, regardless of these advantages, […]
While our team competes in Pittsburgh at DARPA SubTChallenge, hear first hand from our team lead Dr Nicolas Hudson how […]
CSIRO and Boeing have 30 years of history in research and technology collaboration. Over the years, CSIRO and Boeing have […]
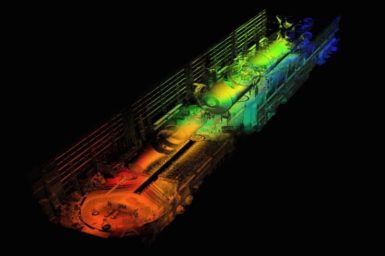
PhotogeoSeq+: Robust Photogeometric Localization over Time for Map-Centric Loop Closure Map-centric Simultaneous Localization And Mapping (SLAM) is emerging as an […]
Wildcat acceleration development Wildcat SLAM is our next-generation 3D SLAM software based on LiDAR sensors. It is a cutting edge […]
Harnessing the power of sophisticated sensor technologies to provide whole vineyard monitoring of canopy structure, nutritional and disease status, reducing […]
DARPA SubT Challenge - CSIRO November Update Our CSIRO SubT teams met recently to review their progress in preparation for […]
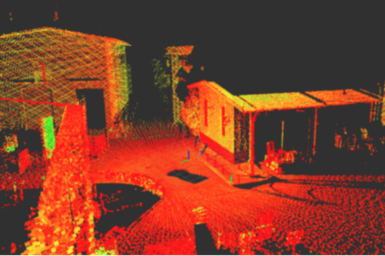
Meet the latest member of the GeoSLAM family, the ZEB-HORIZON 3D mobile scanner Our research in 3D LiDAR-based Simultaneous Localisation and […]
Recently, members of our robotics team travelled to the Amazon rainforest to test a network of sensors, alongside a new […]