Augmented World Models
Augmented World Models
Data61 are developing novel methods for interpreting and fusing data from different sensor modalities. We focus on augmenting 3D data for enhanced understanding of scenes, quantifying the world and collecting data beyond “”our eyes””. Examples of some of the 3D++ technologies we developed include:- Colour Zeb: 3D Lidar + RGB. Broad application in the 3D mapping area.
- HeatWave: 3D + Thermal + RGB. We are exploring applications in medicine, thermal mapping for manufacturing, construction and infrastructure surveys, and disaster assessment and recovery.
- 3D + Gas: Can be used for mapping of gas emissions and plumes in indoor/underground structures (LNG plants, mines, etc.) and outdoor environments (coal seam gas fugitive emissions mapping, airborne pollution assessments, etc.).
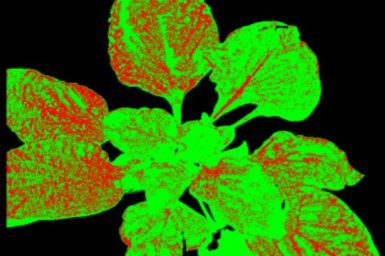
- In-Situ Hyperspectral Mapping (ISHM): 3D + Hyperspectral + RGB + Thermal. This technology has been identified by other CSIRO Business Units (Agriculture and Biosecurity) as essential for phenotyping assessment and identification of pest and diseases. One of our systems, AgScan3D+ (which combines 3D + Hyperspectral + RGB), is being used in joints projects with QLD DAF funded by HIA, projects funded by Vinyculture Australia, phenotyping projects funded by CSIRO Agriculture Business Unit.
Projects













Previous post:
Coming up next: