MAX: Multilegged Autonomous eXplorer
Multilegged Autonomous eXplorer (MAX)
To address the goal of locomotion in very complex and difficult terrains, we are developing a new class of Ultralight Legged Robots.
Multilegged Autonomous eXplorer (MAX), is an ultralight, six-legged robot for traversal and exploration of challenging indoor and outdoor environments. The design of MAX emphasizes a low mass/size ratio, high locomotion efficiency, and high payload capability compared to total system mass.
MAX is 2.25 m tall when in a fully erect stance and has a mass of approximately 60 kg, which makes it 5 to 20 times lighter than robots of comparable size.
MAX is a research vehicle to explore modelling and control of Ultralight Legged Robots subject to flexing, oscillations and swaying; algorithms for gait planning and motion planning under uncertainty; and navigation planning for traversal of complex 3D terrains.
This work is ongoing research. Please contact us for more information.

MAX
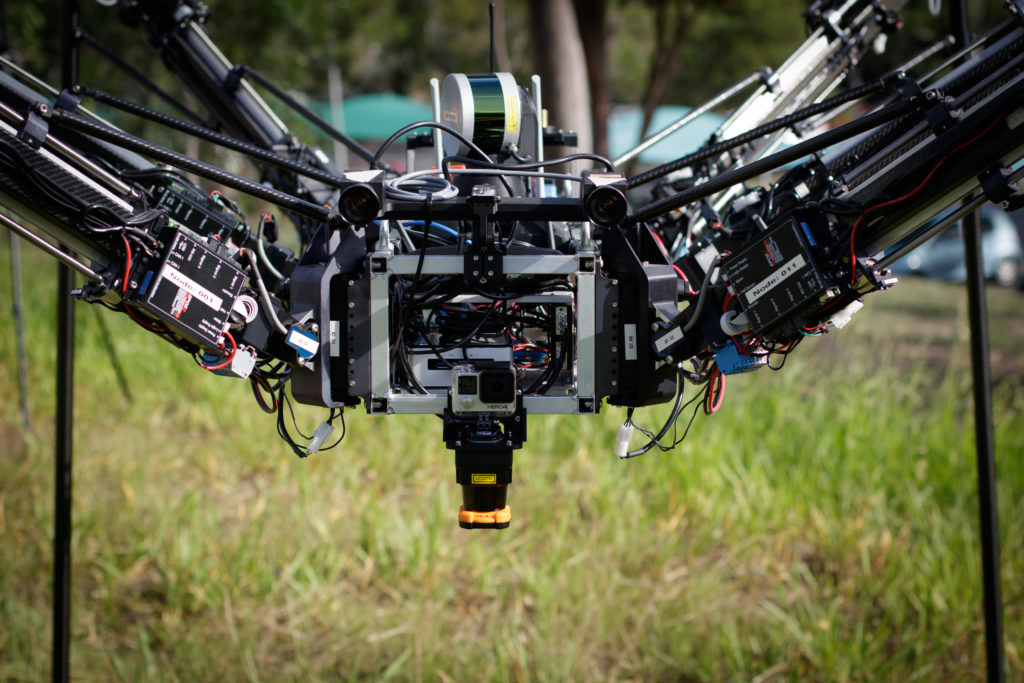
MAX Perception sensor payload
Related papers
- Alberto Elfes, Ryan James Steindl, Fletcher Talbot, Farid Kendoul, Pavan Sikka, Tom Lowe, Navinda Kottege, Marko Bjelonic, Ross Dungavell, Tirthankar Bandyopadhyay, Marcus Hoerger, Benjamin Tam, David Rytz (2017),The Multilegged Autonomous eXplorer (MAX), To appear in proceedings of the IEEE International Conference on Robots and Automation (ICRA 2017), Singapore, May 2017.
[Paper] Download citation [BibTex]