Paper: Bernoulli Filter for Track-Before-Detect: Swerling-1 Target in K-distributed Clutter
In this paper, we investigate the problem of detecting and tracking small targets in sea clutter using the Bernoulli Track-Before-Detect filter. This filter is an optimal recursive Bayesian detector / estimator to determine the state of a single target and its presence in noise.
Typically, clutter amplitude fluctuations are modelled using the Rayleigh distribution. This assumption, however, is not valid in the maritime domain, where sea-clutter is often spikier with a longer distribution tail.
In this work, we develop the Bernoulli filter for a compound Gaussian clutter model with thermal noise and model the target with a Swerling 1 fluctuation. To demonstrate the performance improvement, we model the texture as a gamma distribution, giving an overall K plus noise distribution for the clutter plus noise.
The detection and tracking improvement is then demonstrated using Monte Carlo simulation.
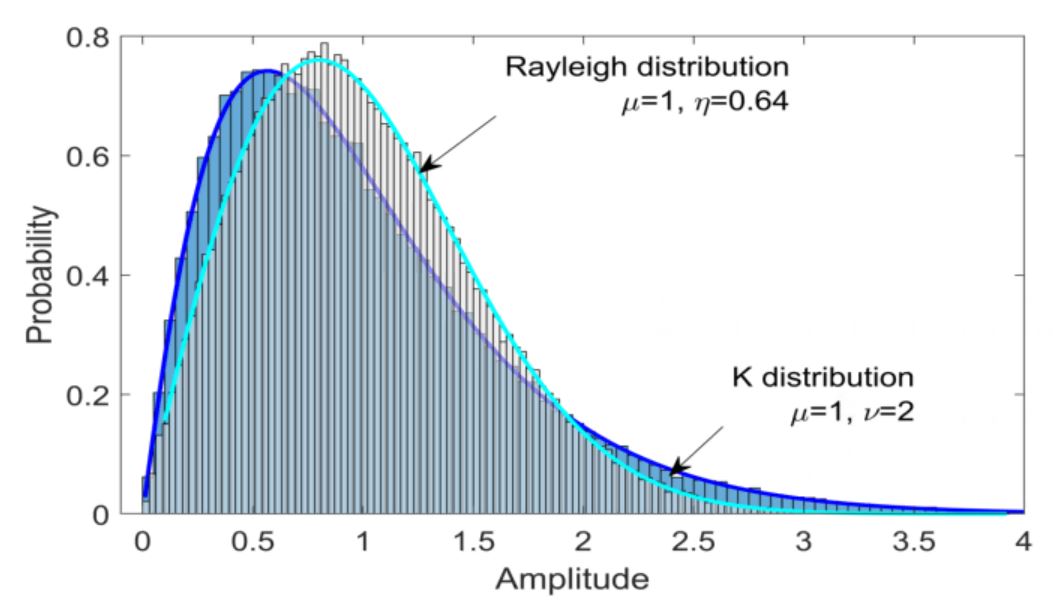
Fig. 1. K-distribution (blue) vs. Rayleigh distribution (cyan).
Branko Ristic ; Luke Rosenberg ; Du Yong Kim ; Xuezhi Wang ; Jason Williams. “Bernoulli Filter for Track-Before-Detect: Swerling-1 Target in K-distributed Clutter”, International Radar Conference, 23 September 2019.
Download the full paper here.
For more information, contact us.
[jetpack_subscription_form title=”Subscribe to our News via Email” subscribe_text=”Enter your email address to subscribe and receive notifications of new posts by email.”]