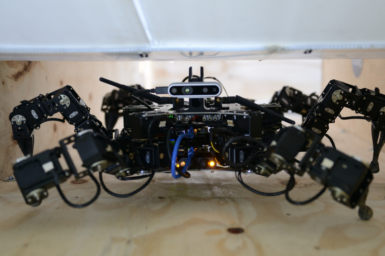
Walking Posture Adaptation for Legged Robot Navigation in Confined Spaces Legged robots have the ability to adapt their walking posture to […]
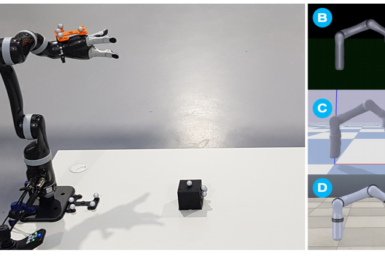
Quantifying the Reality Gap in Robotic Manipulation Tasks We quantify the accuracy of various simulators compared to a real world robotic […]
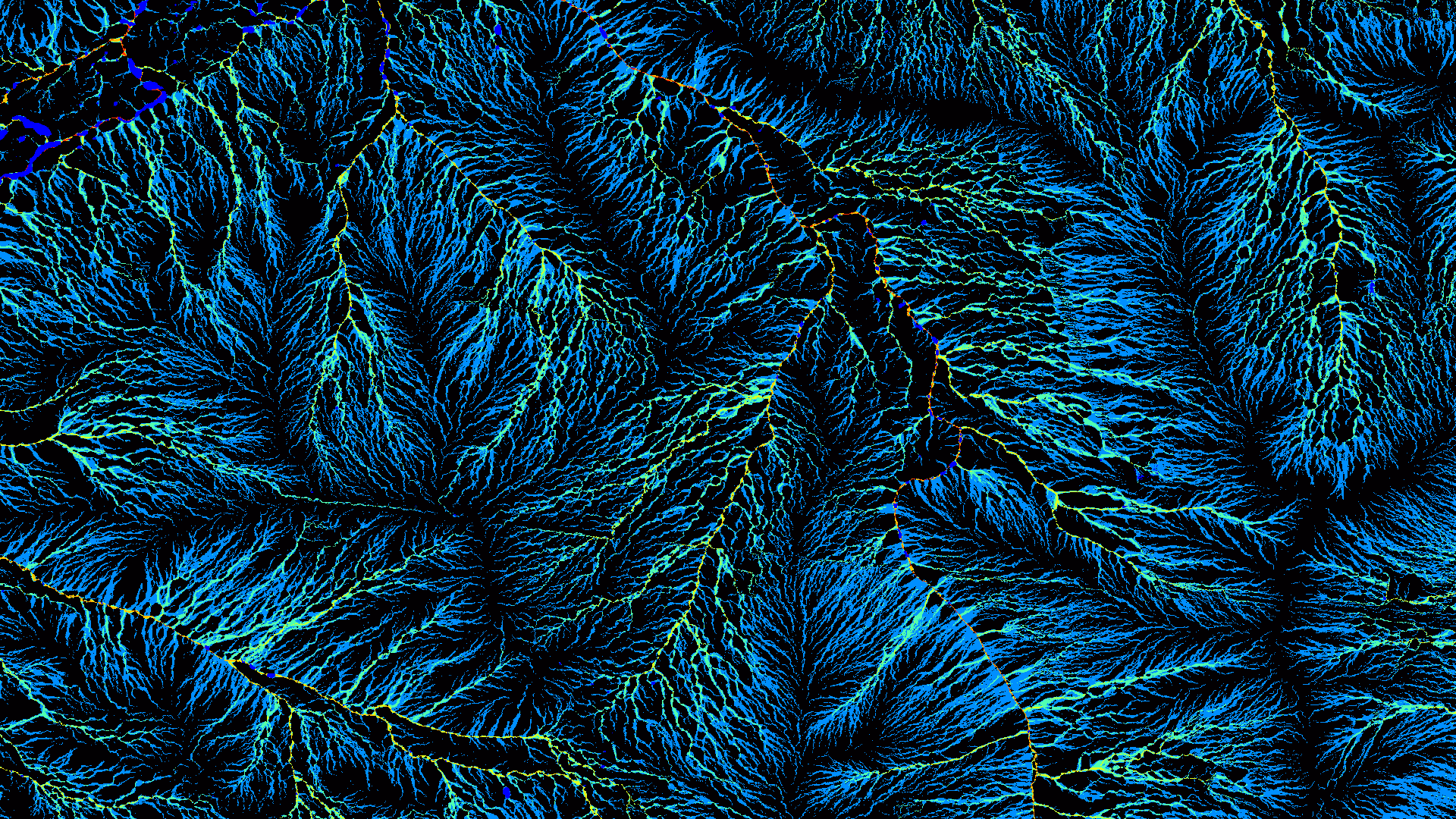
Local Descriptor for Robust Place Recognition using LiDAR Intensity Place recognition is a challenging problem in mobile robotics, especially in […]
Channel 10’s Scope TV attended the UAV Challenge events in Dalby back in September 2018. With Outback Joe being the centre […]
Last week, Dr Peyman Moghadam, our AgTech Cluster Leader, who leads the transition of innovative technologies into farms, took part in the ‘The Future […]
https://research.csiro.au/robotics-staging/event/precision-agriculture-gfia-talk-by-dr-peyman-moghadam/
Some of our experts are getting ready for Madrid and IROS 2018. The 2018 IEEE/RSJ International Conference on Intelligent Robots […]
IROS 2018 Paper: Data Driven Modeling of Shape Recovery Behavior in SMP Laminates Newly discovered and experimented Shape Memory Polymers (SMPs) […]
IROS 2018 Paper: Magneto: A Versatile Multi-Limbed Inspection Robot Inspection of complex industrial structures has always been challenging, especially in […]
IROS 2018 paper: PoseMap: Lifelong, Multi-Environment 3D LiDAR Localization Reliable long-term localization is key for robotic systems in dynamic environments. In a […]