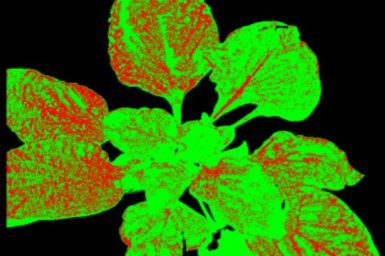
Leveraging artificial intelligence algorithms to reduce environmental impact and spraying rate of horticultural production. Plant diseases are responsible for major […]
After the success of ICRA 2018, which was held in Australia for the first time, our team is now gearing […]
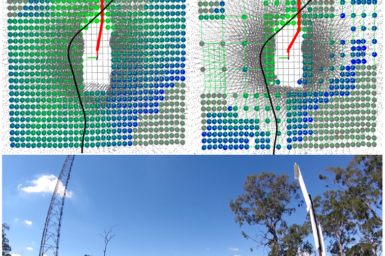
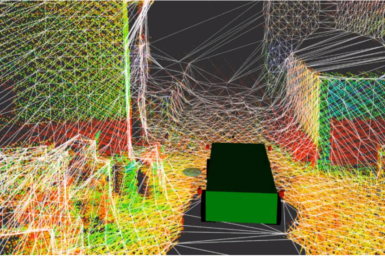
Optimization-Based Terrain Analysis and Path Planning in Unstructured Environments Accurate environment representation is one of the key challenges in autonomous ground […]
OVPC Mesh: 3D Free-space Representation for Local Ground Vehicle Navigation This paper presents a novel approach for local 3D environment representation for […]
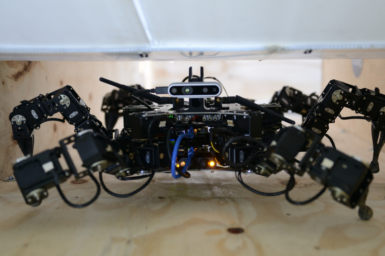
Walking Posture Adaptation for Legged Robot Navigation in Confined Spaces Legged robots have the ability to adapt their walking posture to […]
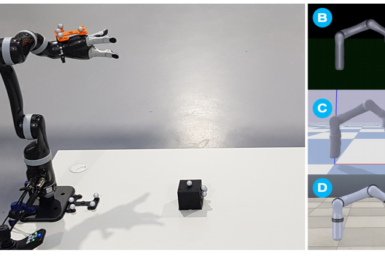
Quantifying the Reality Gap in Robotic Manipulation Tasks We quantify the accuracy of various simulators compared to a real world robotic […]
Local Descriptor for Robust Place Recognition using LiDAR Intensity Place recognition is a challenging problem in mobile robotics, especially in […]
Last week our team got together to hear from our Vacation Students about the projects they have been working on […]
A model for posture adaptation of legged robots while navigating confined spaces In a interview to Ingrid Fadelli from Tech Xplore, […]
Harnessing the power of sophisticated sensor technologies to provide whole vineyard monitoring of canopy structure, nutritional and disease status, reducing […]