We compare two representations used to define the morphology of legs for a hexapod robot, which are subsequently 3D printed. […]
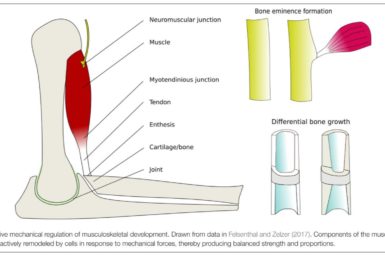
We present some currently unused morphogenetic mechanisms from evolutionary biology and guidelines for transfer to evolutionary robotics. DNA patterns providing […]
Work with talented people to solve the world’s biggest challenges At CSIRO you can be part of helping to solve […]
Our Team Leader and Senior Research Scientist Dr David Howard took part in the making of the Toward Singularity documentary by […]
A key missing technology for the emerging field of soft robotics is the provision of highly selective multidirectional tactile sensing […]
Granular materials, such as sands, soils, grains and powders, are ubiquitous in both natural and artificial systems. They are core to […]
Recently, Dr Nick Hockings, a Postdoctoral Fellow from our group, was a guest speaker for the French Soft Robotics Podcast […]
Evolution is a big part of the natural world...but can robots evolve too? Late last year, our team met with […]
Read more.
Expanding from his work in Quantifying the Reality Gap in Robotic Manipulation Tasks, Jack Collins, one of our PhD students, […]