Paper: Comparing direct and indirect representations for environment-specific robot component design
We compare two representations used to define the morphology of legs for a hexapod robot, which are subsequently 3D printed.
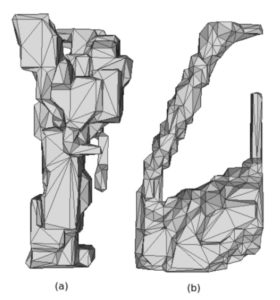
Fig. 1. (a) A leg evolved using a direct representation from a collection of Bezier splines and an Evolutionary Algorithm; (b) A leg developed using an indirect representation from a Compositional Pattern Producing
Network paired with Neuroevolution of Augmenting Topologies Evolutionary Algorithm. Both legs were evolved to be high-performing in a simulated gravel environment.
A leg morphology occupies a set of voxels in a voxel grid. One method, a direct representation, uses a collection of Bezier splines. The second, an indirect method, utilises CPPN-NEAT.
In our first experiment, we investigate two strategies to post-process the CPPN output and ensure leg length constraints are met.
The first uses an adaptive threshold on the output neuron, the second, previously reported in the literature, scales the largest generated artefact to our desired length.
In our second experiment, we build on our past work that evolves the tibia of a hexapod to provide environment-specific performance benefits.
We compare the performance of our direct and indirect legs across three distinct environments, represented in a high-fidelity simulator.
Results are significant and support our hypothesis that the indirect representation allows for further exploration of the design space leading to improved fitness.
Collins, Jack; Cottier, Ben; Howard, David. Comparing direct and indirect representations for environment-specific robot component design. IEEE Congress on Evolutionary Computation (CEC). 2019; 2705-1712
Download the full paper here.
For more information, contact us.
[jetpack_subscription_form title=”Subscribe to our News via Email” subscribe_text=”Enter your email address to subscribe and receive notifications of new posts by email.”]