Paper: PaintCloud: 3D point cloud colourisation
IROS 2018 paper: PaintCloud: 3D point cloud colourisation
PaintCloud is a 3D point cloud colourisation method that brings colour to 3D lidar point clouds in a simple way. The technique is described in “Colourising Point Clouds using Independent Cameras” by Pavel Vechersky, Mark Cox, Paulo V K Borges, Tom Lowe.
The paper has been recently accepted at IEEE Robotics and Automation Letters and will also be presented at IEEE IROS 2018.
More technically, we investigate the problem of colourising a point cloud using an arbitrary mobile mapping device and an independent camera. The loose coupling of sensors creates a number of challenges related to timing, point visibility and colour determination.
We address each of these problems and demonstrate our resulting algorithm on data captured using sensor payloads mounted to hand-held, aerial and ground systems, illustrating the ‘plug-and-play’ portability of the method.
In summary, we have presented an approach to colourising a point cloud acquired with a mobile scanning platform that does not require tight coupling of a mapping device and camera either spatially or temporally.
To this end, we introduced a novel method of synchronising the mapping device data and camera data using optical flow information.
The newly- proposed colourisation pipeline integrates the state-of-the-art point cloud visibility analysis algorithm, for which we have motivated the specific choice of kernel theoretically and empirically.
The colour accumulation and assignment scheme employed by our pipeline is both memory-efficient and robust to outliers resulting from variations in lighting conditions or local misalignment between the mapping device and camera.
Finally, we have demonstrated the flexibility of our colourisation pipeline by applying it to data recorded using variety of different scanning platforms, be it hand-held, autonomous ground vehicle, or aerial vehicle.
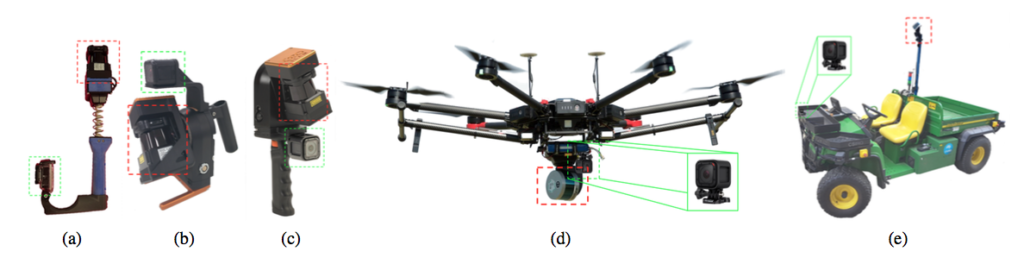
Above, examples of mobile mapping devices with various lidar configurations, ranging from handheld (a-c), to aerial (d) and ground (e) platforms. The original lidar device is highlighted in red, while the added camera (which is not connected or synchronised to the lidar) is indicated by the green box. CSIRO Revo, (c) ZebCam, (d) Hovermap, (e) Gator.
Click here to download the paper.
For more information, contact Dr Paulo Borges on paulo.borges [at] csiro.au
2018, Pavel Vechersky, Mark Cox, Paulo Borges, Thomas Lowe, “Colourising Point Clouds Using Independent Cameras”, in IEEE Robotics and Automation Letters, 2018.
[jetpack_subscription_form title=”Subscribe to our News via Email” subscribe_text=”Enter your email address to subscribe and receive notifications of new posts by email.”]