ICRA2018 Workshop: Multilegged Robots – Towards Robust Real-World Deployments
Multilegged robots have unique potential advantages over wheeled and tracked systems in regard to traversal of rough and unstructured terrain, and this has led to a growing interest and body of research in legged systems. However, there are very few actual real-world deployments of multilegged robots, and so far there has been no significant uptake of legged robots in domains such as agriculture, mining, manufacturing, environmental monitoring and others. This workshop will explore the “missing ingredients” that are holding back widespread real-world deployment of multilegged robots, and will feature both distinguished invited speakers and solicited papers.
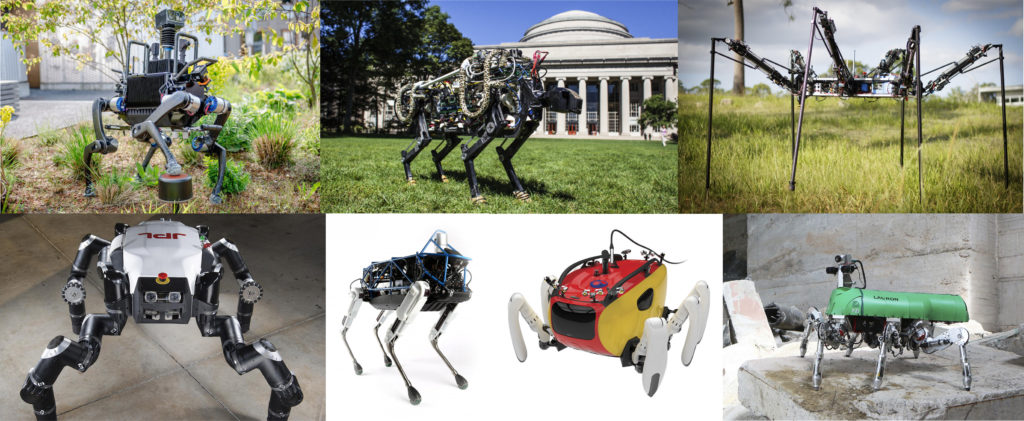
Few examples of multilegged robots [clockwise from top left]: ANYmal (ANYbotics/ETHZ), MIT Cheetah (MIT), MAX (CSIRO), Lauron V (FZI-KIT), Crabster CR200 (KRISO), Spot (Boston Dynamics), Robosimian (NASA-JPL).
Introduction
Legged robots have many unique advantages over wheeled and tracked systems in terms of gaining access to and maintaining locomotion efficiency on rough and unstructured terrain. This makes them ideally suited for applications such as disaster response, remote inspection and exploration in many different environments.
Within the field of legged robotics, multilegged robots are understood as having four or more legs, in contrast to bipedal or humanoid robots. In recent years, bipedal or humanoid robots have been tested in environments designed for humans and using human tools and machinery and there is significant research going on in human-sized and shaped robots; however, their morphologies also impose substantial challenges in regard to dynamic control of bipedal walking, system stability, ability to recover from actuator failures, and others. In contrast, multilegged robots designs are typically inspired by quadruped mammals and hexapedal or octopedal arthropods. These robots have significant advantages over bipedal systems in regard to dynamics, stability, and ability to negotiate challenging terrain.
However, there are very few actual real-world deployments of multilegged robots, and so far there has been no significant uptake of legged robots in domains such as agriculture, mining, manufacturing, environmental monitoring and others.
Scientific goals
Legged robots have long been proposed as the solution for traversing complex environments and difficult terrain. However, in spite of significant advances in recent years, current systems are generally far from adequate for actual field deployments. Smaller legged robots are severely limited in payload and effective range; larger outdoor legged robots are often too inefficient and slow for field use, and unable to navigate really challenging terrain.
Despite growing research interest in legged locomotion, a number of “missing ingredients” hold legged robots back from wide-spread real-world deployment.
Some of the issues faced by researchers include the performance limitations of current legged robots (when compared to biological systems), the inherent lower efficiency of legged versus wheeled locomotion, design constraints related to available materials and actuators, and substantial power requirements; there are, however, many other challenges to be addressed.
This workshop’s goal is to identify the fundamental research challenges whose solution is required to bring legged robots to real-world applications. We will explore challenges and potential solutions in the areas of multilegged robot design, control, planning, perception, and systems integration.
To this end, the workshop will bring together experts and budding researchers in the field to identify the key challenges and solution in these areas, facilitating the development of field-deployable multilegged systems in the future.
Some of the specific questions we will address in this workshop include:
- What are optimal multilegged robot designs for complex industrial environments or challenging outdoor terrain?
- What are appropriate motion planning algorithms for high DOF robots in complex, 3D environments?
- How should power requirements be brought into the motion planning process?
- How can robust state estimation be done in robots with complex designs and many DOFs?
- What is the minimum control performance that still allows the robot to accomplish its goal?
- What are the cost drivers for multilegged robots, and how can they be reduced without negatively impacting control performance and reliability?
- Are there regulatory constraints that slow down the widespread application of multilegged robots?
Workshop Program
Location: Room P11 (Plaza level) at the Brisbane Convention and Exhibition Center.
Session 1
9:00-9:10 Welcome address – Navinda Kottege
9:10-9:30 – Alberto Elfes (Large ultralight multilegged systems)
9:30-9:50 – Marco Hutter (Traversing natural terrain with multi-legged robots)
9:50-10:10 – Bong-Huan Jun (Crabster project)
10:10-10:30 – Claudio Semini (HyQ-REAL quadruped from the research lab to the real world)
10:30-11:00 Morning tea break
Session 2
11:00-11:20 – Sangbae Kim (Cheetah 3: dynamic mobile platform for disaster response)
11:20-11:40 – Erwin Coumans (Narrowing the Reality Gap for Deep Reinforcement Learning of Quadrupedal Locomotion)
11:40-12:00 – Georg Heppner (Lauron V: Autonomous Walking with a Robust Hexapod)
12:00-12:30 Poster session / Short Talks
12:30-13:30 Lunch break
Session 3
13:30-13:50 – Xing Wang (Laikago: Towards an easily accessible quadruped robot platform)
13:50-14:10 – Avik De (Toward robust locomotion subject to variations in robot scale, mass, payload, and environmental conditions)
14:10-14:30 – Dave Rollinson (Series elastic actuators for legged locomotion)
14:30-15:00 Live Demos
15:00-15:30 Afternoon tea break
Session 4
15:30 16:45 Panel discussion – All speakers
16:45 17:00 Closing remarks – Nicolas Hudson
Submission guidelines
We invite submissions related to multilegged robots to overview the current state of the art, and to propose new directions. Submissions will be judged on novelty, scientific contribution, clarity, and relevance. We welcome submissions of 2-4 page short papers in the double-column IEEE ICRA format in the following areas:
- Multilegged robot designs for complex industrial environments or challenging outdoor terrain
- Motion planning for high DOF robots in complex, 3D environments
- Energy aware motion planning for multilegged robots
- State estimation for multilegged robots
- Control architectures for multilegged robots
Authors of accepted papers are expected to give a 3 minute oral presentation, and to present a poster at the workshop. All submissions must be original and not previously or simultaneously submitted to another venue.
Please submit your contributions via email to navinda.kottege@csiro.au
Important dates
- Submission deadline – Friday 20 April 2018 (Extended)
- Notification of acceptance – Friday 4 May 2018
- Poster submission – Monday 14 May 2018
- Workshop day – Friday 25 May 2018
All dates and times are Anywhere on Earth (AoE)
If you have a robot related to your submission, we strongly encourage you to bring the robot to the workshop with you to be demonstrated. Please contact the organizers to discuss and arrange logistics.
Organizing committee
- Navinda Kottege – Senior Research Scientist, Robotics and Autonomous Systems Group, CSIRO
- Alberto Elfes – Chief Research Scientist and Research Group Leader Robotics and Autonomous Systems Group, CSIRO
- Tirthankar Bandyopadhyay – Research Scientist, Robotics and Autonomous Systems Group, CSIRO
- Marco Hutter – Professor and Head of Lab, Robotics Systems Lab, ETH Zürich
- Nicolas Hudson – Senior Principal Research Scientist, Robotics and Autonomous Systems Group, CSIRO
Invited speakers
We have a line up of internationally recognized speakers who would present the state-of-the-art in multilegged robots at the workshop.
- Alberto Elfes – CSIRO (Large ultralight multilegged systems)
- Marco Hutter – ETHZ (Traversing natural terrain with multi-legged robots)
- Bong-Huan Jun – KRISO (Crabster project)
- Claudio Semini – IIT (HyQ-REAL quadruped from the research lab to the real world)
- Sangbae Kim – MIT (Cheetah 3: dynamic mobile platform for disaster response)
- Erwin Coumans – Google Research (Narrowing the Reality Gap for Deep Reinforcement Learning of Quadrupedal Locomotion)
- Georg Heppner – FZI (Lauron V: Autonomous Walking with a Robust Hexapod)
- Xing Wang – Unitree Robotics (Laikago: Towards an easily accessible quadruped robot platform)
- Avik De – Ghost Robotics (Toward robust locomotion subject to variations in robot scale, mass, payload, and environmental conditions)
Publication
All accepted presentations will be made available on the workshop website and Arxiv. After the workshop, selected authors will be invited to extend their work for submission to a special issue of a prominent robotics journal (TBC).
Venue
This workshop will be held as part of ICRA 2018 on Friday 25th of May 2018 at the Brisbane Convention and Exhibition Centre in Brisbane, Australia.
Contact
Please contact Navinda Kottege for more information.
Support
This workshop is supported by the CSIRO Robotics Group https://research.csiro.au/robotics-staging/ , the IEEE RAS Technical Committee on Mechanisms and Design http://www.ieee-ras.org/mechanisms-and-design and HEBI Robotics.