Evolutionary approaches for legged robot control
Evolutionary approaches for legged robot control
Due to their morphologies, legged robots are ideal platforms for investigating biologically-inspired approaches to control and navigation.
We are currently investigating the application of evolutionary/machine learning techniques to generate task-specific and platform-specific controllers, targeting improved performance.
As an example, depending on the control system, variation of joint controller gain values provide a way to decrease energy consumption during operation.
We present a fully automated hardware optimisation test-bed that use Evolutionary Algorithms to find a optimal set of controller parameters that increase locomotion performance.
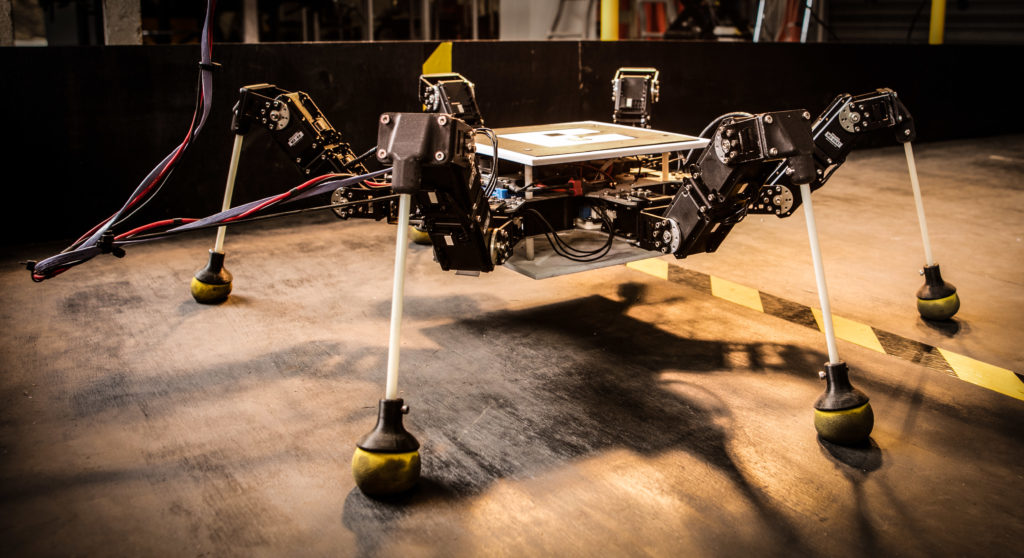
Baldwin on testbed
A testbed that evolves hexapod controllers in hardware
Related papers
Previous post:
Coming up next: