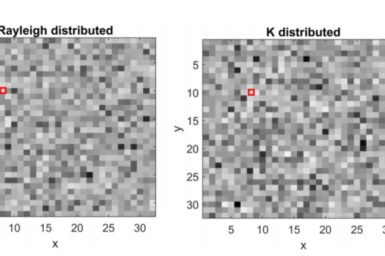
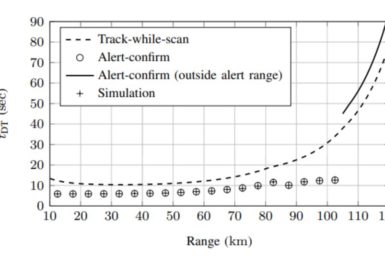
The detection and tracking of targets in the maritime environment can be a challenging problem. One approach to improve the […]
Space exploration and work such as search and rescue or resource mining is dangerous and often unsuited to manned platforms […]
Alert-confirm detection is a refinement of sequential detection that has been popular for electronically-scanned-array radar since its discovery in the […]
A reliable perception pipeline is crucial to the operation of a safe and efficient autonomous vehicle. Fusing information from multiple […]
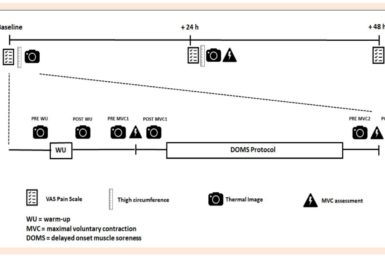
Muscle damage and soreness associated with increased exercise training loads or unaccustomed activity can be debilitating and impact the quality […]
Legged robots are exceedingly versatile and have the potential to navigate complex, confined spaces due to their many degrees of […]
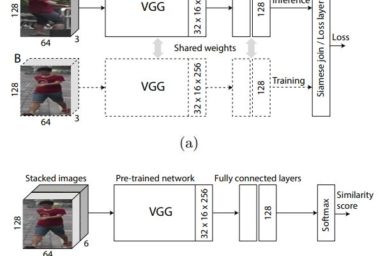
Tracking by detection is a common approach to solving the Multiple Object Tracking problem. In this paper we show how […]
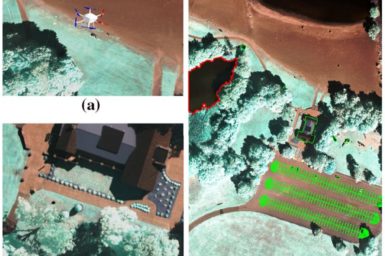
Unmanned aerial vehicles represent a new frontier in a wide range of monitoring and research applications. To fully leverage their […]
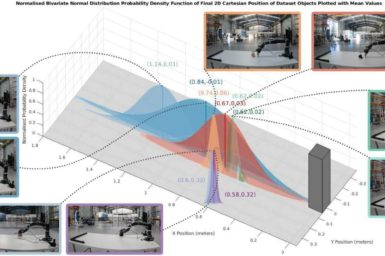
We present a benchmark to facilitate simulated manipulation; an attempt to overcome the obstacles of physical benchmarks through the distribution […]
Multilegged robots have the ability to perform stable locomotion on relatively rough terrain. However, the complexity of legged robots over […]