IROS 2018 Paper: Magneto: A Versatile Multi-Limbed Inspection Robot Inspection of complex industrial structures has always been challenging, especially in […]
IROS 2018 paper: PoseMap: Lifelong, Multi-Environment 3D LiDAR Localization Reliable long-term localization is key for robotic systems in dynamic environments. In a […]
The D61+ LIVE event hosted by CSIRO's Data61 in Brisbane on Sep 18 and 19 brought together more than 2,000 […]
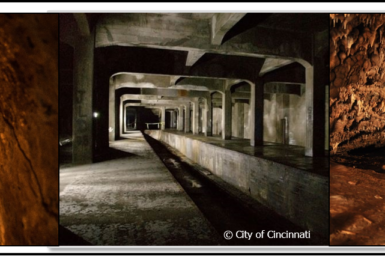
REVOLUTIONISING HOW WE OPERATE IN THE UNDERGROUND DOMAIN The DARPA Subterranean or “SubT” Challenge is a US$3.5 million prize competition […]
Recently, members of our robotics team travelled to the Amazon rainforest to test a network of sensors, alongside a new […]
On 13 August 2018, the Sixth Wave Alliance's nine forming member organisations gathered at the CSIRO’s Queensland Centre for Advanced Technologies […]
Mr Gavin Bryce, the principal of Queensland Academies Creative Industries (QACI), spoke to Year 10 students Daniella and Alex, and the […]
Building on the excitement of the Queensland iAwards win, the Robotics and Autonomous Systems Group Hovermap Team got the cheers […]
Last Wednesday, 29 August, 170 Queensland University of Technology Staff and Students attended the annual visit to the CSIRO Pullenvale site. […]
Wear It Purple Day fosters supportive, safe and accepting environments for the LGBTI+ community. We had a morning tea today […]