Project description The Robotics and Autonomous Systems Group at CSIRO's Data61 have been developing Autonomous Ground Vehicles that are able to […]
Project description Soft robots are poised to deliver real solutions into tough environments including disaster recovery and maintenance in confined space. […]
Project description Most learning experiments with robots involve a static environment that does not experience significant change during learning. This […]
Project description A PhD top-up is available (through a competitive process) to work with the Robotics and Autonomous Systems Group […]
Project description CSIRO’s robots are expected to survive and thrive in difficult environmental conditions. As part of this effort, we […]
Special Report: Mining, the new frontier Autonomous drones, intelligent software, scientific advances, new-age analytics, and world-leading education – the future […]
Project description CSIRO owns a quadrotor platform that can fly, but is also capable of rolling on the floor using […]
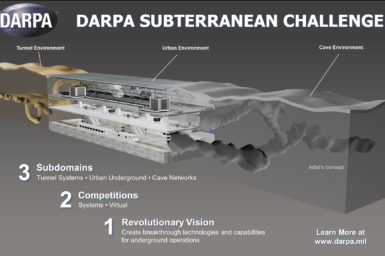
DARPA Subterranean Challenge 2018. We are the only Australian entity competing in the SubT Challenge, and one of only seven […]
Some of our experts are getting ready for Madrid and IROS 2018. The 2018 IEEE/RSJ International Conference on Intelligent Robots […]
IROS 2018 paper: Paper: A Software Framework for Planning under Partial Observability Planning under partial observability is both challenging and critical […]