Technical Writer – 3 Months The Opportunity A Technical Writer Contractor is required to join our Wildcat SLAM acceleration. Wildcat […]
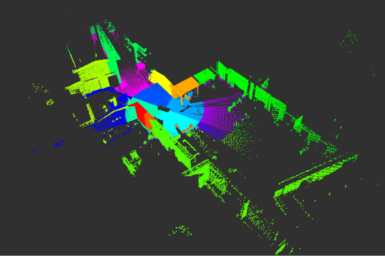
Project description The Robotics and Autonomous Systems Group at CSIRO’s Data61 have been developing algorithms for Robotics and Autonomous systems […]
On 12 March 2019, we officially opened the CSIRO's Data61 Robotics Innovation Centre to further expand our world-leading research into […]
Position description Do you want to work for two of the world's leading research organisations, live in a city with […]
We are going to Space! Space Technology Future Science Platform (FSP) The Space Technology FSP aims to build world-leading capability […]
Last week our team attended the 2019 The Australian International Airshow and Aerospace & Defence Exposition. As one of Asia-Pacific's […]
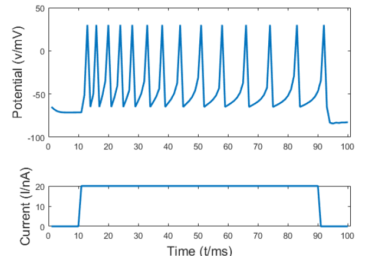
Evolving Spiking Neural Networks for Nonlinear Control Problems Spiking Neural Networks are powerful computational modelling tools that have attracted much […]
Safe terrain probing method for multi-legged robots operating on brittle surfaces Multi-legged robots working in challenging environments are often required […]
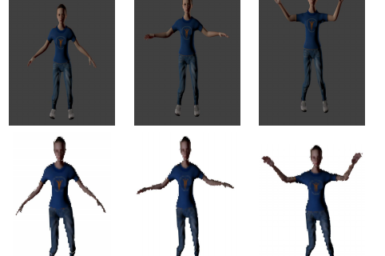
Skeleton Driven Non-Rigid Motion Tracking and 3D Reconstruction This paper presents a method which can track and 3D reconstruct the […]