Automap – our first Wildcat SLAM Early Adopter for 2020
Wildcat SLAM is our next-generation 3D SLAM software based on LiDAR sensors. It is a cutting edge C++ Simultaneous Localisation and Mapping (SLAM) library currently being developed by CSIRO’s Data61 Robotics and Autonomous Systems Group.
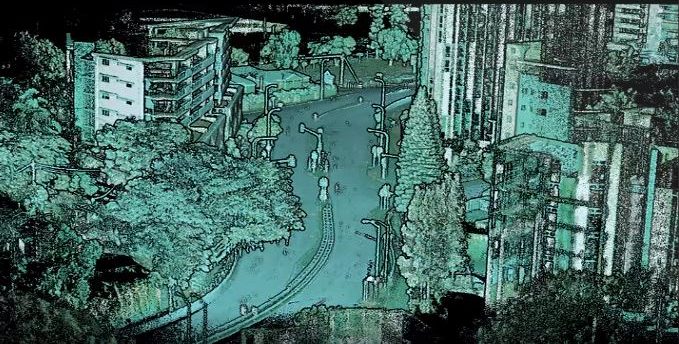
Click to watch Automap’s showcase.
Wildcat is a key enabling technology in robotics perception for autonomous robot operation. It processes various sensor data, including 3D lidar, four high-resolution colour cameras, and IMU data, in order to produce an accurate trajectory of the robot in 3D space as well as a detailed 3D point cloud map of the explored environment.
Our first Wildcat SLAM Early Adopter for 2020 is Automap, an Australian technology SME who will be licensing our Wildcat SLAM and Catpack hardware design to develop 3D Mapping and Localisation systems for the mining, construction and infrastructure sectors.
Wildcat is the next generation SLAM technology from our group, and is already being used as a key technology component by CSIRO’s Data61 drone autonomy spin-off company Emesent.
We are open to partnerships and collaborations for research, innovation, development, and commercialisation.
For more information, contact us.
[jetpack_subscription_form title=”Subscribe to our News via Email” subscribe_text=”Enter your email address to subscribe and receive notifications of new posts by email.”]