CSIRO.au
Data61
Events
Contact us
Gallery
Robotics
Skip to content
Skip to search
About us
Research & Technology
Projects
Publications
Code, Software and Datasets
Awards
News
Work with us
Home
Contact us
Research & Technology
Events
About us
Research & Technology
News
Work with us
Photo Gallery
CSIRO.au
Data61
Events
Contact us
Gallery
Search
Search
Legged
#Legged
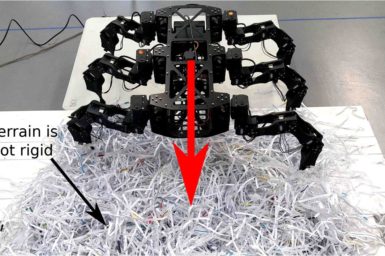
Paper: Probe-before-step walking strategy for multi-legged robots on terrain with risk of collapse
A model for posture adaptation of legged robots while navigating confined spaces
ICRA2018 Workshop: Multilegged Robots – Towards Robust Real-World Deployments