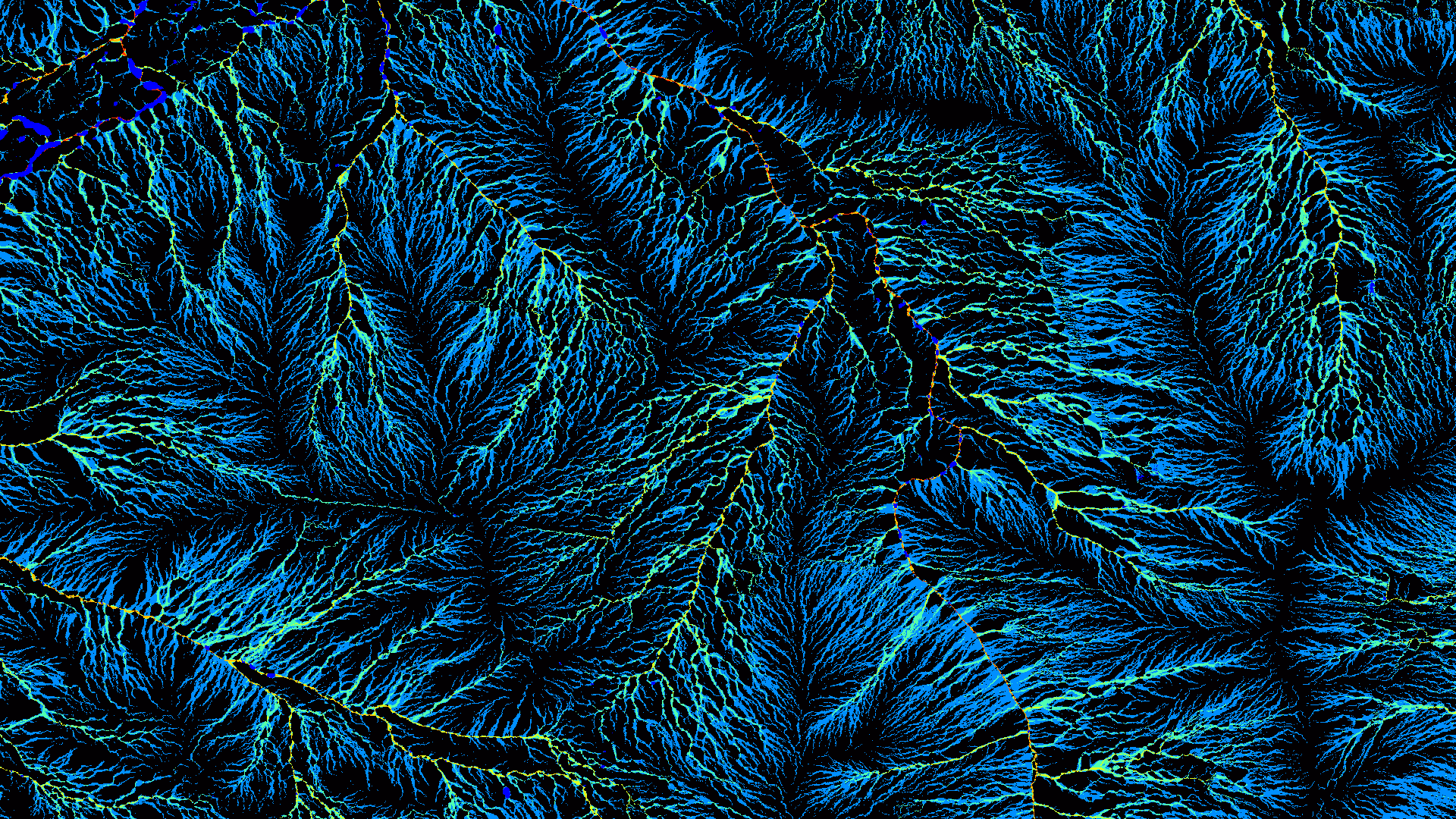
Local Descriptor for Robust Place Recognition using LiDAR Intensity Place recognition is a challenging problem in mobile robotics, especially in […]
Some of our experts are getting ready for Madrid and IROS 2018. The 2018 IEEE/RSJ International Conference on Intelligent Robots […]
IROS 2018 paper: Paper: A Software Framework for Planning under Partial Observability Planning under partial observability is both challenging and critical […]
IROS 2018 Paper: Data Driven Modeling of Shape Recovery Behavior in SMP Laminates Newly discovered and experimented Shape Memory Polymers (SMPs) […]
IROS 2018 Paper: Magneto: A Versatile Multi-Limbed Inspection Robot Inspection of complex industrial structures has always been challenging, especially in […]
IROS 2018 paper: PoseMap: Lifelong, Multi-Environment 3D LiDAR Localization Reliable long-term localization is key for robotic systems in dynamic environments. In a […]
IROS 2018 paper: PaintCloud: 3D point cloud colourisation PaintCloud is a 3D point cloud colourisation method that brings colour to […]
Elastic LiDAR Fusion: Dense Map-Centric Continuous-Time SLAM The concept of continuous-time trajectory representation has brought increased accuracy and efficiency to […]
Summary description: Tours are available as options in the registration form. Please register early as there is limited capacity for all […]
Summary description: This workshop focuses on technologies that allow robots to be designed by software. This workshop aims to generate […]