Since 2017, PhD student Troy Cordie has been working on NeWheel under the supervision of Dr Tirthankar Bandyopadhyay from our […]
Tim Hojnik, one of our PhD students under the supervision of Professor Jonathan Roberts (QUT) and Mr Paul Flick (CSIRO) […]
Writing for 'CSIRO's Resourceful Magazine Issue 20: Decoding digital in mining,' Tony Heselev describes in detail how CSIRO's robots can […]
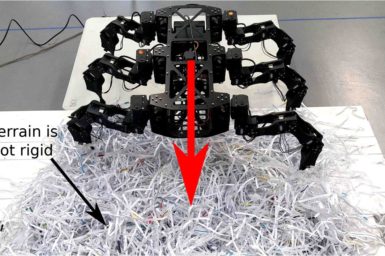
Multi-legged robots are effective at traversing rough terrain. However, terrains that include collapsible footholds (i.e. regions that can collapse when […]
Evolution is a big part of the natural world...but can robots evolve too? Late last year, our team met with […]
Travel over sloped terrain is difficult as an incline changes the interaction between each wheel and the ground resulting in […]
Since early 2018, Tim Hojnik, one of our PhD students has been working on Posable Hubs For Robotic Platforms in […]
3D Situational Awareness technology is a patent-pending multi-camera real-time platform developed by the CSIRO's Data61 Robotics and Autonomous Systems Group. […]
Our robot team has already hit the road headed to Satsop Business Park in Elma, Washington for the DARPA Urban […]
Read more.