Paper: A Comparative Study of Track-Before-Detect Algorithms in Radar Sea Clutter
The detection and tracking of targets in the maritime environment can be a challenging problem. One approach to improve the tracking ability of weak targets is to use track before detect (TBD). However, different TBD algorithms have different underlying assumptions about the background clutter which are not always valid.
In this paper we consider three TBD algorithms: the histogram probabilistic multi-hypothesis tracker (H-PMHT), the Bernoulli filter and the multi-Bernoulli filter.
The H-PMHT inherently assumes the clutter is modelled with a distribution derived from the continuous limit of the Poisson distribution, while the two Bernoulli filters both assume Rayleigh distributed clutter.
To quantify performance, we use a Monte Carlo simulation with the sea clutter generated using both Rayleigh and K-distributions. The performance is then determined using the optimal sub-pattern assignment (OSPA) distance.
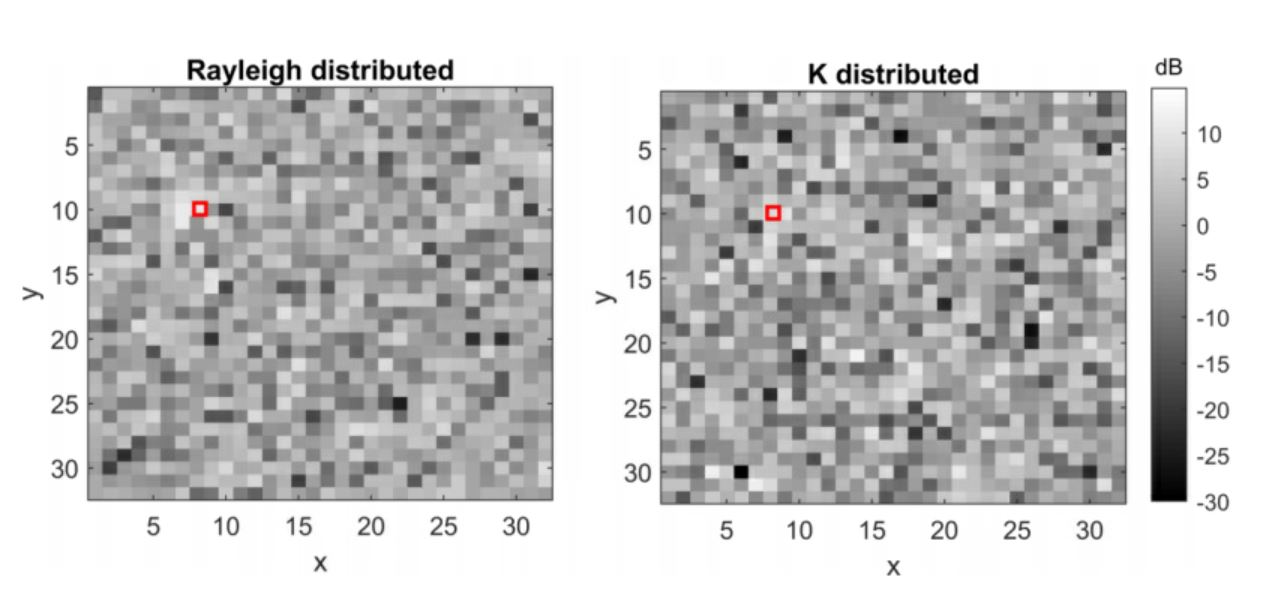
Fig. 1. A single realisation of measurement zk at scan 10 with SIR = 5 dB. The ground truth is indicated by a red box.
D. Y. Kim, B. Ristic, X. Wang, L. Rosenberg, J. Williams and S. Davey, “A Comparative Study of Track-Before-Detect Algorithms in Radar Sea Clutter,” 2019 International Radar Conference (RADAR), TOULON, France, 2019, pp. 1-6, doi: 10.1109/RADAR41533.2019.171306.
Download the full paper here.
For more information, contact us.
[jetpack_subscription_form title=”Subscribe to our News via Email” subscribe_text=”Enter your email address to subscribe and receive notifications of new posts by email.”]