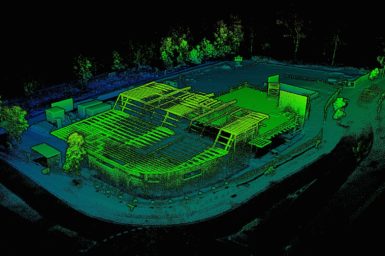
Wildcat is a cutting-edge 3D SLAM (Simultaneous Localisation and Mapping) software with world-leading accuracy and robustness. The technology’s highly-accurate mapping […]
Robot Navigation & Multi-agent Teaming NavStack is an advanced autonomy software product which provides an autonomy solution which empowers heterogeneous […]
3D Situational Awareness technology is a patent-pending multi-camera real-time platform developed by the CSIRO’s Data61 Robotics and Autonomous Systems Group. […]
Augmented World Models Data61 are developing novel methods for interpreting and fusing data from different sensor modalities. We focus on […]
Story originally published by Terrain NRM on 26/11/2019. Cassowaries will be captured on camera in a new project to reduce […]
The fresh water system is a complex dynamic system comprising catchment areas, aquifers, rivers, lakes and recycled water. Wireless sensor […]
While our team competes in Pittsburgh at DARPA SubTChallenge, hear first hand from our team lead Dr Nicolas Hudson how […]
With funding from the Australian coal industry’s research program ACARP, CSIRO is collaborating with the Cooperative Research Centre for Mining, […]
Livestock Monitoring – Ceres Tag We’re working with AgTech company, Ceres Tag, to develop next-generation ear tags to track and […]
Milestones in the Automated Bobcat Project include: Automated Bobcat will scan a pile of dirt and create the 3D area […]
Increasing efficiency and safety in logistics by using autonomous vehicles ensures limited dependency on human operations under hazardous conditions. Woodside […]
The Lake Wivenhoe Integrated Mobile Sensor Network Project was a collaboration between CSIRO and Seqwater. As Seqwater is the single […]