Artificial Intelligence for Robot Navigation
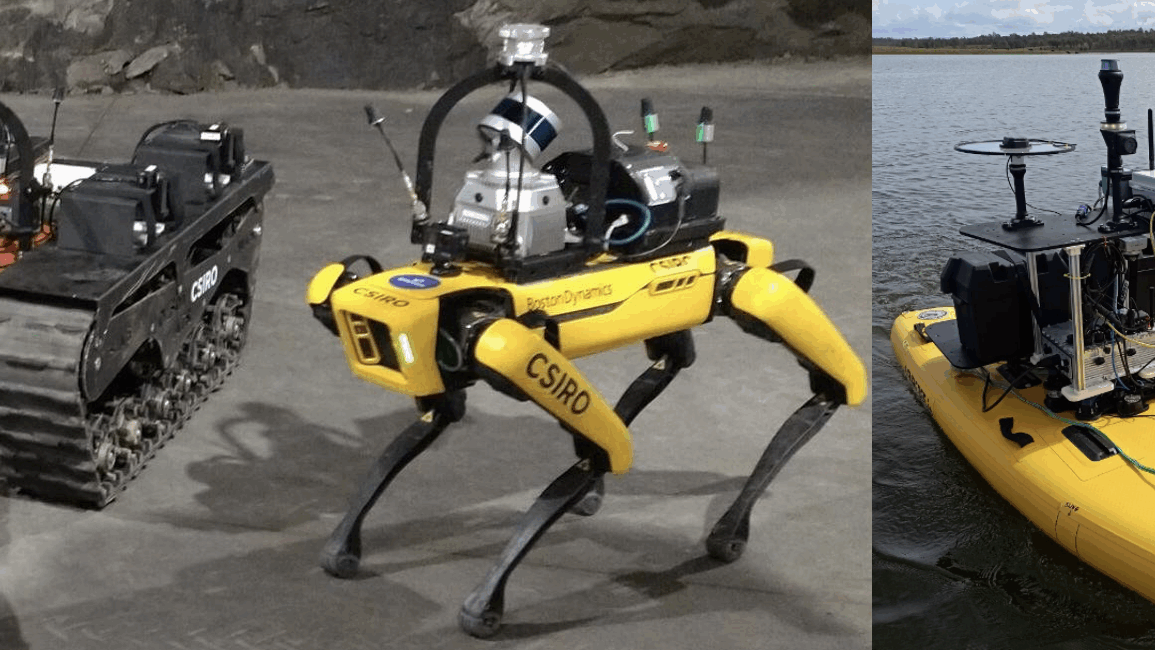
We are developing the technology for navigating multiple robots through complex, unstructured environments. This includes over coral reefs, through forests and into caves. It also includes managed environments like mines, construction sites and paddocks.