Dynamic Situational Awareness in Human-Robot Teams
In a new paper published at ACM Transactions on Human-Robot Interaction, we present a framework explaining the dynamic nature of situational awareness required in human-robot teaming.
Importantly, 5 types of situational awareness (SA) inefficiencies resulting from gaps between actual and required situational awareness, namely, SA latency, SA loss, SA inaccuracy, incomplete SA and excess SA, and their main consequences: delayed actions, missed actions, faulty / unnecessary actions, confusion and unnecessary cognitive load and fatigue. Also, we identified a range of factors affecting the dynamic nature of required and actual levels of situational awareness, falling into human, robot and contextual categories. We also reveal various strategies, initiated by humans and robots, that assist in maintaining the required situational awareness. All these findings are grounded in active and repeated experience of human collaborators in diverse human-robot teaming applications, including disaster response, agriculture, manufacturing, mine inspection, surgery, and crafting.
In human-robot teams, having appropriate situational awareness is crucial for successful human-robot collaboration. Our findings in this paper inform the implementation of accurate estimates of dynamic situational awareness and the design of user-adaptive human-robot interfaces, thereby contributing to the future design of highly collaborative and effective human-robot teams.
For more information please see:
Senaratne, H., Tian, L., Sikka, P., Williams, J., Howard, D., Kulić, D. and Paris, C., 2025. A Framework for Dynamic Situational Awareness in Human Robot Teams: An Interview Study. ACM Transactions on Human-Robot Interaction. https://dl.acm.org/doi/abs/10.1145/3743693
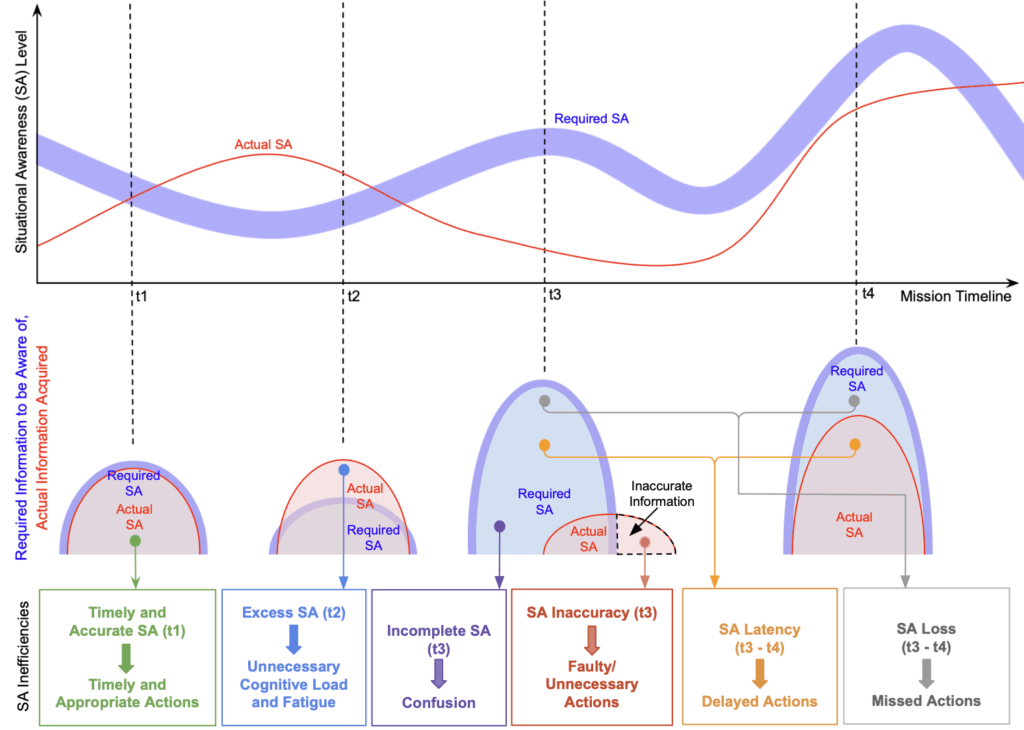
Our novel framework demonstrating the gaps between required and actual situational awareness (SA) in a dynamic human-robot team mission