
- This event has passed.
ICRA2020 Workshop: Towards Real-world Deployment of Legged Robots
This is a collaborative workshop between CSIRO’s Data61 Robotics and Autonomous Systems Group with ETH Zurich and University College of London by Dimitrios Kanoulas, Navinda Kottege, Krzysztof, Tadeusz Walas, Aaron Ames, Marko Bjelonic.
Disaster areas and collapsed buildings, underground tunnels and caves these are one of the most demanding environments to traverse.
These surroundings are characterized by rough and unstable terrain, and the environment is changing over time. Additionally, in most of the cases, the visibility is low. Human operating in such an environment is put on high risk. Therefore, using robots in such cases is the need.
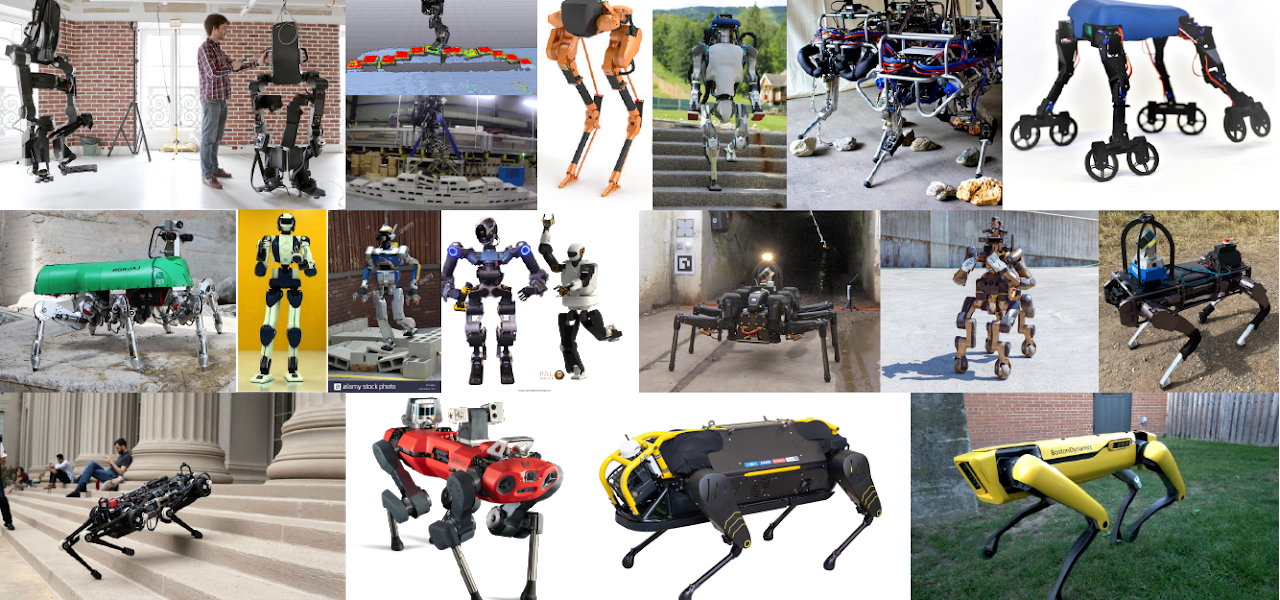
Due to their high mobility and locomotion capabilities, legged machines are becoming the robot of choice in such harsh conditions.
However, there are only a few real-world deployments of walking robots, and their performance in challenging scenarios still needs to be improved. In particular, we look for robots capable of navigating and mapping in dynamic environments, able to rapidly search and manipulate objects in challenging settings.
In our workshop, we are bringing together research and industry. This approach will help us in examining the different real-world application of walking robots and will provide the ground for the discussion about the missing technological ingredients for the successful and everyday deployment of legged robots. The workshop will feature invited speakers of high reputation as well as solicited papers.