Distributed Control and Estimation in Networked Environments
This is the homepage of the “Distributed Control and Estimation in Networked Environments” or “DICE” project. This project runs under the Networks Research Group (NRG) at Data61 and started in 2012. This project follows-on from its predecessor, the “SWARM” project which ran from 2006-2011.
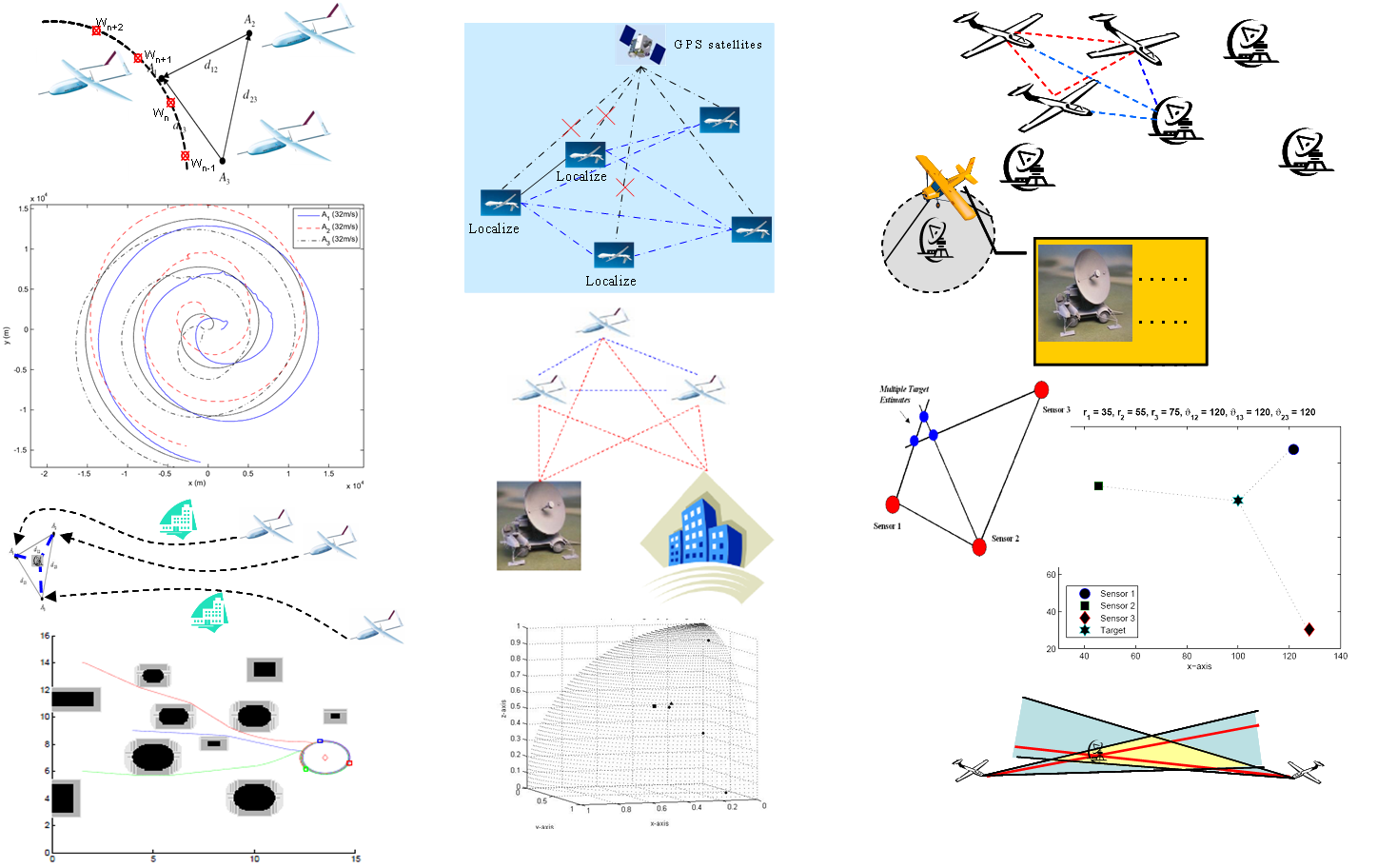
This project focuses on research in the following areas:
- Development of general tools for cooperative target localization and sensor self-localization, including when GPS is lost, and determination of localization performance, for example in terms of bias and covariance;
- Formation control of autonomous vehicles and control and estimation problems in multi-agent systems and networks;
- Time difference of arrival de-interleaving for localisation;
- Characterization of the robustness of a networked system to agent or link failure; e.g. characterisation of those sensor networks that remains localizable or connected in the event of agent or link failure;
- Secure control and estimation complex networked environments.
Each topic bears on various fundamental research problems driven by certain real life scenarios of DSTO interest as well as more specific DSTO research tasks.
The primary user of the research is Australian Defence. An occasional user and supporter of the project is the US Air Force who has supplied funding through AOARD. However, the work has other potential users, e.g. those with interest in monitoring bushfires or with surveillance tasks.
Current Research Team
Prof. Brian Anderson, Data61 Canberra and the Australian National University
Dr. Guoqiang Mao, Data61 Sydney and the University of Technology Sydney (UTS)
Dr. Changbin (Brad) Yu, The Australian National University
Dr. Adrian N. Bishop, Data61 Canberra and the Australian National University
Yiming (Alex) Ji, Data61 Canberra & The Australian National University
Baoqi Huang, The Australian National University
Seh Chung Ng, The University of Sydney
Xiaolei (Eric) Hou, The Australian National University
Dr. Zijie (Jeffrey) Zhang, Data61 Canberra
Mohammad Deghat, The Australian National University
Alireza Motevallian, The Australian National University
Yun Hou, The Australian National University
Ben Nizette, The Australian National University
Junming Wei, The Australian National University
External Partners
Defence Science and Technology Organisation (DSTO), Electronic Warfare and Radar Division.
Key DSTO Collaborators
Dr. Sam Drake
Dr. Hatem Hmam
Others Involved
Prof. A.S. Morse (Yale University)
Prof. S. Dasgupta (University of Iowa)
Dr. Ming Cao (University of Groningen)
Dr. Julien Hendrickx (MIT)
Tyler Summers (University of Texas)
Dirk van der Walle (Delft Technical University)
Andrew Sutton (ANU)
Alex Cheng (ANU)
Hongyi Chee (ANU)
International Collaboration
Yale University
University of Iowa
University of Groningen
University of California Santa Barbara
University of California San Diego
University Catholique de Louvain
Delft Technical University
Zhejiang University
University of Tokyo
University of South Australia
Publications
Publications for the predecessor SWARM project (2006-2011) can be found here: http://bit.ly/IOGcIF
Publications for the DICE project (2012-current) can be found here: (to be updated)
Selected Publications
S. Drake, B.D.O Anderson and C. Yu, “Causal Association of Electromagnetic Signals using the Cayley Menger Determinant”, Applied Physics Letters, Vol. 95, No. 3, July 2009, http://arxiv.org/abs/0908.3143
I. Shames, B. Fidan and B.D.O. Anderson, “Minimization of the effect of noisy measurements on localization of multi-agent autonomous formations”, Automatica, Volume 45, No. 4, pp. 1058-1065, April 2009, http://doi:10.1016/j.automatica.2008.11.018
A.N. Bishop, B. Fidan, B.D.O. Anderson, K. Dogancay and P.N. Pathirana, “Optimality Analysis of Sensor-Target Localization Geometries”, Automatica, Vol. 46, No. 3, March 2010, http://doi:10.1016/j.automatica.2009.12.003
X. Ta, G. Mao and B.D.O. Anderson, “On the Phase Transition Width of K-connectivity in Wireless Multi-hop Networks”, IEEE Transactions on Mobile Computing, vol. 8, no. 7, pp. 936-949, July 2009, http://dx.doi.org/10.1109/TMC.2008.170
A.N. Bishop, B.D.O. Anderson, B. Fidan, P.N. Pathirana and G. Mao, Bearings-Only Localization Using Geometrically Constrained Optimization. IEEE Trans. On Aerospace and Electronic Systems, Vol. 45, no. 1, pp. 308-320, January 2009, http://dx.doi.org/10.1109/TAES.2009.4805281
B.D.O. Anderson, C. Yu, B. Fidan, J.M. Hendrickx, “Rigid Graph Control Architectures for Autonomous Formations”, IEEE Control System Magazine, 23(2):48-63, Dec 2008,http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=4653105
J.M. Hendrickx, C. Yu, B. Fidan, and B.D.O. Anderson, “Rigidity and persistence for ensuring shape maintenance of multi-agent meta formations,” Asian Journal of Control, vol. 10, no. 2, pp. 131-143, March 2008, http://www.ajc.org.tw/pages/News/AJC_News.htm