3D from 2D
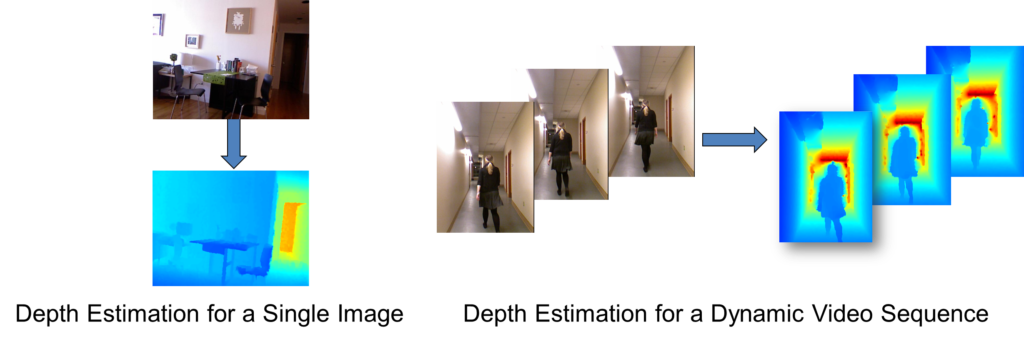
In this project, we aim at developing algorithms to estimate a depth map from a single image or a dynamic video sequence. Our techniques could have tremendous impact on 3DTV, and virtual reality for personal devices.
Motivation
Depth estimation from a single image or a dynamic video sequence is challenging since:
- on its own, a single image does not provide depth cues,
- traditional rigid scene reconstruction method do not apply to dynamic monocular video sequences.
Existing approaches tend to over-smooth the depth maps.
Overview
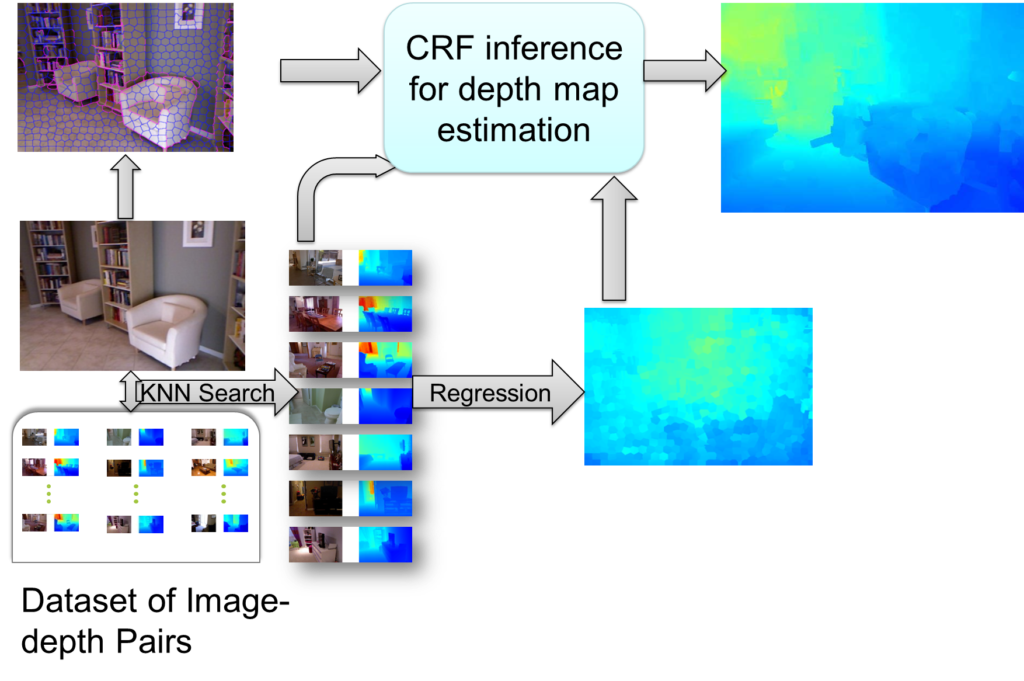
We propose to exploit the availability of large datasets of image-depth pairs. For each test image or video sequence, we retrieve its top n nearest neighbors from the dataset. We combine the retrieved information with prior knowledge of the scene structure in a conditional random field model that lets us estimate depth. Our approach preserves the depth discontinuities, estimates the motion of foreground objects in monocular video sequences and, in short, yields better results than the state-of-the-art.
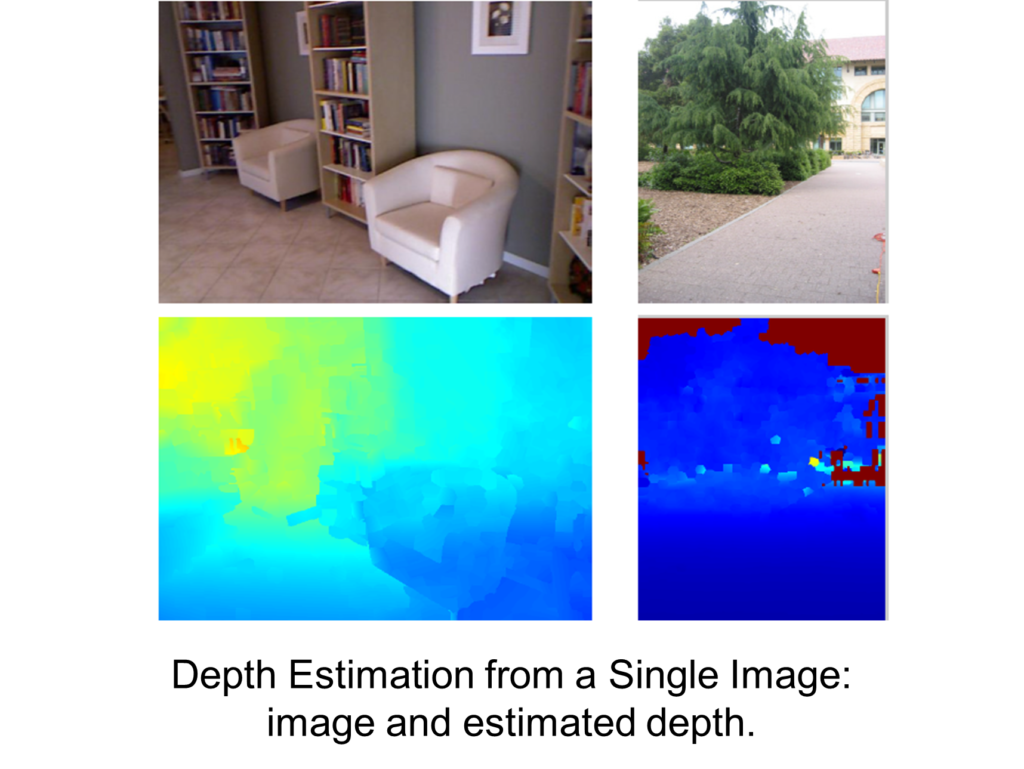
Results
Publications
Discrete-continuous Depth Estimation from a Single Image. Miaomiao Liu, Mathieu Salzmann, Xuming He. CVPR 2014.